2015-04-12
2015-04-12 4355
4355В работающей системе выключаются интегральная и дифференциальная составляющие регулятора (Tи = ∞, Tд = 0), т.е. система переводится в П-закон регулирования. Путем последовательного увеличения Kp с одновременной подачей небольшого скачкообразного сигнала задания добиваются возникновения в системе незатухающих колебаний с периодом Kkp. Это соответствует выведению системы на границу колебательной устойчивости. При возникновении данного режима работы фиксируются значения критического коэффициента усиления регулятора Kkp и периода критических колебаний в системе Tkp. При появлении критических колебаний ни одна переменная системы не должна выходить на уровень ограничения. По значениям Kkp и Tkp рассчитываются параметры настройки регулятора:
П-регулятор: Kp = 0.55 Kkp;
ПИ-регулятор: Kp = 0.45 Kkp; Tи = Tkp /1.2;
ПИД-регулятор: Kp = 0.6 Kkp; Tи = Tkp /2; Tд = Tkp /8.
Расчет настроек регулятора можно производить по критической частоте собственно объекта управления ωkp. Учитывая, что собственная частота ωkp объекта управления совпадает с критической частотой колебаний замкнутой системы с П-регулятором, величины Kkp и Tkp могут быть определены по амплитуде и периоду критических колебаний собственно объекта управления.
При выведении замкнутой системы на границу колебательной устойчивости амплитуда колебаний может превысить допустимое значение, что в свою очередь приведет к возникновению аварийной ситуации на объекте или к выпуску бракованной продукции. Поэтому не все системы управления промышленными объектами могут выводиться на критический режим работы.
^ 3.4.2 Метод затухающих колебаний
Применение этого метода позволяет настраивать регуляторы без выведения системы на критические режимы работы. Так же, как и в предыдущем методе, для замкнутой системы с П-регулятором, путем последовательного увеличения Kp добиваются переходного процесса отработки прямоугольного импульса по сигналу задания или возмущения с декрементом затухания D = 1/4.
Далее определяется период этих колебаний Tк и значения постоянных интегрирования и дифференцирования регуляторов Tи и Tд
Для ПИ-регулятора: Tи = Tк /6;
Для ПИД-регулятора: Tи = Tк /6; Tд = Tк /1.5.
После установки вычисленных значений Tи и Tд на регуляторе необходимо экспериментально уточнить величину Kp для получения декремента затухания D = 1/4. С этой целью производится дополнительная подстройка Kp для выбранного закона регулирования, что обычно приводит к уменьшению Kp на 20 ÷ 30%. Аналогичный метод настройки используется в адаптивных регуляторах американской фирмы "Фоксборо".
Большинство промышленных систем регулирования считаются качественно настроенными, если их декремент затухания D равен 1/4 или 1/5.
В настоящее время разработан новый метод настройки замкнутых систем управления, основанный на подаче пробных синусоидальных колебаний на вход регулятора. По амплитуде и фазе колебаний выходного сигнала объекта управления осуществляется расчет настроек ПИ-регулятора, исходя из условия обеспечения заданного показателя колебательности M и максимума отношения Kp / Tи.
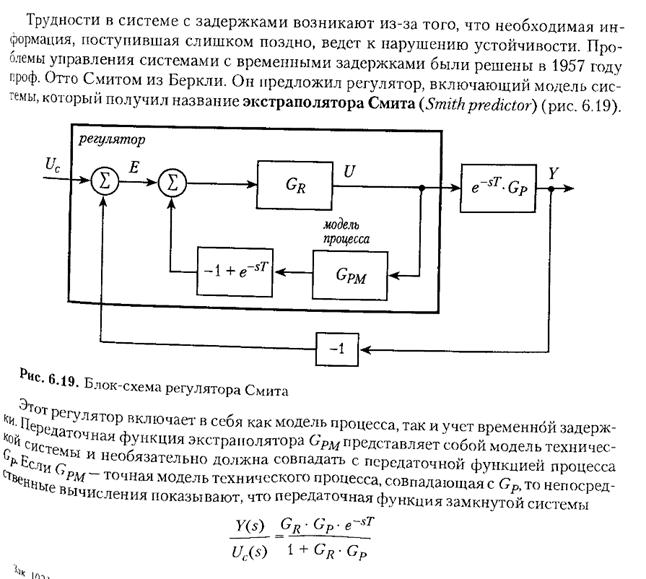
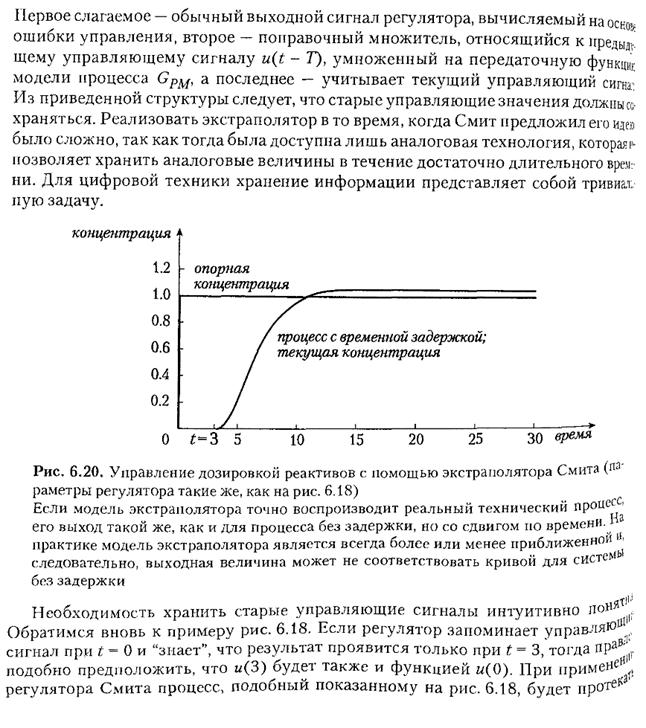
15. Регулирование объектов с запаздыванием. Регулятор Смита.