 2015-05-05
2015-05-05 952
952Станки с ЧПУ, назначение.
Автоматизация технологического процесса механической обработки имеет место в условиях крупносерийного и массового производства, где применяются станки-автоматы, заменившие универсальные и специализированные станки. Автоматы управляются при помощи механических устройств, которые в условиях мелкосерийного и единичного производства нерентабельны, ввиду их сложной переналадки. Возникла необходимость в средствах автоматизации, которые позволяли бы производить частую переналадку станков при обработке деталей малых партий или отдельных деталей. Эта задача решается применением станков с электронными системами управления, которые называют станками с программным управлением.
Основным преимуществом таких станков является возможность их переналадки при переходе на обработку новой детали в весьма короткое время, при централизованной подготовке технологических программ. Программа позволяет проектировать системы дистанционного управления станками и создавать при этом легко переналаживаемые автоматические линии и участки комплексной обработки деталей.
В качестве программоносителей служат перфокарты, перфоленты, магнитные ленты, а также штырьковые барабаны или панели, магазины переключателей и др.
Типовая блок-схема станка с ЧПУ.
Она имеет следующие элементы: 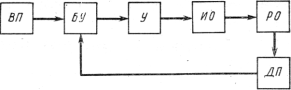
ВП – ввод программы. Назначение элемента – считывать с программоносителя закодированные управляющие сигналы в виде электрических, магнитных, световых или других физических воздействий.
БУ – блок управления. Его назначение – преобразовывать соответствующие физические воздействия в электрические командные импульсы или потенциалы.
У – усилитель. В случае необходимости он поднимает полученный электрический потенциал до необходимого уровня, обеспечивающего надежное управляющее воздействие.
ИО – исполнительный орган. Реализует командные импульсы путем подключения рабочего органа станка к источнику движения или выполнения других функций автоматического управления.
РО – рабочий орган. Фактически реализует командные воздействия, являясь целевым управляемым органом станка.
ДП – датчик перемещений. Его назначение – регистрировать фактическое перемещение рабочего органа станка.








