 2015-04-30
2015-04-30 632
632Градиентные системы продольного градиента создают градиент индукции вдоль продольной оси  аксиальной системы поляризующего магнитного поля и часто называются градиентными системами .
аксиальной системы поляризующего магнитного поля и часто называются градиентными системами .
Рис. 2.5.1. Простейшая градиентная система Z
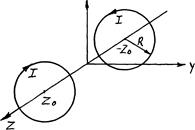 Для градиентной системы Z используем простейшую пару Максвелла (рис.2.5.1) из двух витков с радиусом R и силой тока I, расположенных на расстоянии +-z0 от начала координат.
Для градиентной системы Z используем простейшую пару Максвелла (рис.2.5.1) из двух витков с радиусом R и силой тока I, расположенных на расстоянии +-z0 от начала координат.
Интегрируя (2.2.1) от нуля до 2π, для составлявшей индукции кругового проводника в точке на оси с координатой  , получим
, получим
 . (2.5.1)
. (2.5.1)
Разложение Bz в степенной ряд записывается в виде
 , (2.5.2)
, (2.5.2)
где  – коэффициент ряда
– коэффициент ряда  -го порядка.
-го порядка.
Записанные в относительных единицах ( ) выражения для коэффициентов ряда (2.5.2) имеют вид
) выражения для коэффициентов ряда (2.5.2) имеют вид
 , (2.5.3)
, (2.5.3)
 , (2.5.4)
, (2.5.4)
 . (2.5.5)
. (2.5.5)
Задача синтеза градиентных систем сводится к поиску таких значений параметров, когда коэффициенты при нежелательных членах ряда (2.5.2) третьего и выше порядков будут равны нулю.
Так, для градиентной системы Z, состоящей из одной пары катушек, исключение члена 3-го порядка произойдет при  , которое является решением уравнения H3=0. Это решение впервые использовано Таннером в 1965 г. Диаметр области с нелинейностью градиента менее 1% в этом случае близок к 28% диаметра катушек.
, которое является решением уравнения H3=0. Это решение впервые использовано Таннером в 1965 г. Диаметр области с нелинейностью градиента менее 1% в этом случае близок к 28% диаметра катушек.
Компенсация двух членов ряда (2.5.2) может быть произведена при использовании двух пар катушек. Пусть градиентная система имеет катушки одинакового радиуса  с силой тока в обмотках I1 и I2. Тогда, решив систему уравнений вида
с силой тока в обмотках I1 и I2. Тогда, решив систему уравнений вида
 (2.5.6)
(2.5.6)
можно получить значения параметров  ,
,  и отношение токов, I2/I1=7.47, при которых происходит исключение членов 3-го и 5-го порядков ряда (2.5.2).
и отношение токов, I2/I1=7.47, при которых происходит исключение членов 3-го и 5-го порядков ряда (2.5.2).
Планарные градиентные системы X(y), схемы включения
Планарные ГС строятся из проводников в форме кругового витка или комбинаций линейных проводников с током, расположенных на плоскости. Токи в секциях обмоток градиентных систем направлены таким образом, что индукция магнитного поля в центре системы равна нулю. Поэтому в разложении (2.1.5) присутствуют только члены с нечетными степенями координаты, по которой создается градиент и можно пользоваться разложениями функции индукции в степенные ряды.
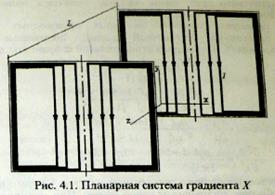 Градиент магнитного поля, создаваемый системой 41 направлен вдоль оси X. Для создания градиента вдоль оси Y используется устройство, повернутое на 90º вокруг оси Z.
Градиент магнитного поля, создаваемый системой 41 направлен вдоль оси X. Для создания градиента вдоль оси Y используется устройство, повернутое на 90º вокруг оси Z.
Задача синтеза планарных систем поперечного градиента первоначального решается приближенно при допущении, что рабочие и обратные проводники обмоток имеют бесконечную длину, а боковые проводники отсутствуют. Параллельные оси Z составляющая индукции поля бесконечно длинного прямолинейного проводника с током I, расположенного на расстоянии x0 в точке пространства с координатами x,y,z определяются выражением
μ0-магнитная постоянная, z0-половина расстояния между плоскостями обмоток. Для системы на рисунке:
Bz=2(G1x+G3x3+…Gnxn…), где  – коэффициент n-го члена ряда, n=1,3,5…
– коэффициент n-го члена ряда, n=1,3,5…
Отсюда следует, что линейный характер градиента определяется первым членом разложения, а все остальные члены ряда искажают линейный характер изменения индукции. Задача получения линейного градиента магнитного поля сводится к минимизации коэффициентов третьего и выше порядков.
Расчёт электрических параметров планарной градиентной системы X(Y).
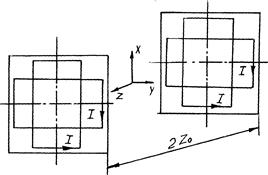
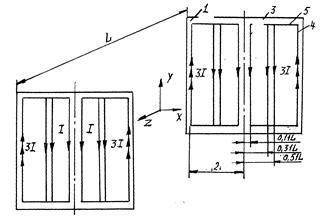 Рис. 2.5.10. Система поперечного градиента (1,2 – параллельные плоско-сти, 3, 4, 5 - прямые, обратные и боковые проводники)
Рис. 2.5.10. Система поперечного градиента (1,2 – параллельные плоско-сти, 3, 4, 5 - прямые, обратные и боковые проводники)
Градиент магнитного поля, создаваемый рассматриваемой системой, направлен вдоль одной из осей, параллельной плоскости наконечников, например, вдоль оси X. Для создания градиента относительно другой оси, например, оси Y, используется аналогичное устройство, развернутое на 90°. Направим ось X перпендикулярно оси симметрии катушек. Обозначим расстояние между пластинами L=2z0 (рис.2.5.10). Тогда, параллельная оси Z составляющая индукции поля бесконечно длинного прямолинейного проводника, расположенного на расстоянии X0 с током I в точке с координатами z, x определяется выражением
 , (2.5.20)
, (2.5.20)
где μ0– магнитная постоянная; z0 – половина расстояния между пластинами. Для системы прямоугольных витков, изображенной на рис.2.5.10, с идентичными по величине и направлению токами в двух полюсных плоскостях, выражение (2.5.20) раскладывается в ряд
 , (2.5.21)
, (2.5.21)
где  – коэффициент n-го члена ряда,n=1,3,5..
– коэффициент n-го члена ряда,n=1,3,5..
Отсюда видно, что линейный характер градиента определяется первым членом разложения, а все последующие члены ряда искажают линейный закон изменения индукции. Таким образом, задача получения линейного градиента магнитного поля сводится к минимизации коэффициентов третьего и выше порядков.
Проведем оценку нежелательных градиентов третьего, пятого и седьмого порядков. Запишем более подробно выражение для -компоненты индукции магнитного поля
 , (2.5.22)
, (2.5.22)
где  – относительный размер катушки.
– относительный размер катушки.
Нетрудно рассчитать, что изменения поля, определяемые градиентами третьего, пятого и седьмого порядков, составляют 5%, 1% и 0,2%, соответственно, от изменения, создаваемого требуемым линейным градиентом  .
.
С точки зрения разрешающей способности, вклад нежелательных градиентов должен составлять не более 1%. Следовательно, для создания необходимой линейности нужно компенсировать градиенты, вносящие в магнитное поле изменения порядка 1%.
Проведенные расчеты позволяют сделать вывод о необходимости компенсации градиентов  до седьмого порядка включительно, так как их вклад в изменение поля наиболее ощутим. Для этого необходимое число секций в катушках должно быть не менее трех. Система прямоугольных катушек, состоящая из трех секций с одинаковым числом витков K, имеет четыре независимых параметра: x01,x02,x03 – расстояния от оси симметрии до первой, второй и третьей секций, x04 – расстояние от оси симметрии до общей стороны (до обратных проводников). Подбором этих параметров, можно скомпенсировать три члена ряда (2.5.21) – третьего, пятого и седьмого порядков.
до седьмого порядка включительно, так как их вклад в изменение поля наиболее ощутим. Для этого необходимое число секций в катушках должно быть не менее трех. Система прямоугольных катушек, состоящая из трех секций с одинаковым числом витков K, имеет четыре независимых параметра: x01,x02,x03 – расстояния от оси симметрии до первой, второй и третьей секций, x04 – расстояние от оси симметрии до общей стороны (до обратных проводников). Подбором этих параметров, можно скомпенсировать три члена ряда (2.5.21) – третьего, пятого и седьмого порядков.
Значения параметров были получены путем решения системы урав-нений
 (2.5.23)
(2.5.23)
Полученные результаты ( ) не позволяют построить градиентную систему, так как в этом случае локаль-ный метод не учитывает конечную длину секций и влияние боковых про-водников. Однако влияние этих факторов невелико и положения секций можно использовать в качестве начальных при дальнейшем уточнении положения секций, оптимизируя параметры.
) не позволяют построить градиентную систему, так как в этом случае локаль-ный метод не учитывает конечную длину секций и влияние боковых про-водников. Однако влияние этих факторов невелико и положения секций можно использовать в качестве начальных при дальнейшем уточнении положения секций, оптимизируя параметры.
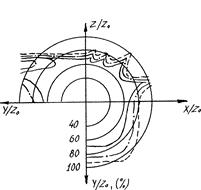
Рис. 2.5.11. Область линейности поля системы поперечного градиента
В результате расчета, с учетом конечной длины всех проводников по формулам (2.2.27 – 2.2.28), получены следующие значения положений секций: центр общей стороны секций должен находиться на расстоянии  (рис.2.5.10), а параллельные ей стороны секций – на расстояниях
(рис.2.5.10), а параллельные ей стороны секций – на расстояниях  . Если секции катушек содержат более одного витка, то в указанных точках должны располагаться центры секций. При этом область с нелинейностью градиента ±1% составляет 0.95L вдоль оси X, 0.80L вдоль оси Y и 0.56L вдоль оси Z.
. Если секции катушек содержат более одного витка, то в указанных точках должны располагаться центры секций. При этом область с нелинейностью градиента ±1% составляет 0.95L вдоль оси X, 0.80L вдоль оси Y и 0.56L вдоль оси Z.
На рис.2.5.11 показаны области градиентного поля с нелинейностями 1, 2 и 5% в плоскостях OZX, OZY, OXY. Конфигурация области линейности градиента подтверждает полученные результаты.
Планарные корректирующие системы (X2-Y2)*(2XY), схемы включения и порядок расчёта.
 Корректор
Корректор  ,
, 
Поле, пропорциональное  создает система катушек, показанная на рис.2.2.5. Необходимо компенсировать производную
создает система катушек, показанная на рис.2.2.5. Необходимо компенсировать производную  . Для этого, решая уравнение
. Для этого, решая уравнение
 , (2.2.32)
, (2.2.32)
найдем  , что дает расчетный относительный рабочий объем – 38%. Оптимизация, с учетом конечной длины проводников, позволяет получить уточненное решение:
, что дает расчетный относительный рабочий объем – 38%. Оптимизация, с учетом конечной длины проводников, позволяет получить уточненное решение:  и увеличить рабочий объем до 56%.
и увеличить рабочий объем до 56%.
Корректор  можно получить, повернув корректор на 45° вокруг оси
можно получить, повернув корректор на 45° вокруг оси  .
.








