 2015-04-30
2015-04-30 5536
5536Виды потерь мощности. Потери мощности в главном приводе станка слагаются из потерь в его механической части и потерь в электрической. Потери мощности в механической части  можно разделить на постоянные и нагрузочные. Постоянные потери не зависят от полезной нагрузки и обусловливаются трением в подшипниках, передачах, перемешиванием масла при холостом вращении привода. Они связаны с частотой ращения валов и характеризуются мощностью холостого хода
можно разделить на постоянные и нагрузочные. Постоянные потери не зависят от полезной нагрузки и обусловливаются трением в подшипниках, передачах, перемешиванием масла при холостом вращении привода. Они связаны с частотой ращения валов и характеризуются мощностью холостого хода  . Нагрузочные потери
. Нагрузочные потери  это переменные потери, обусловленные полезной нагрузкой и ей пропорциональные. Таким образом, суммарные потери в механической части привода
это переменные потери, обусловленные полезной нагрузкой и ей пропорциональные. Таким образом, суммарные потери в механической части привода 
Определение мощности холостого хода. Мощность холостого хода на к-й ступени частоты вращения определяется по зависимости

где  коэффициент, учитывающий потери мощности в элементах управления:
коэффициент, учитывающий потери мощности в элементах управления:  (меньшие значения — при малом числе передвижных блоков, муфт);
(меньшие значения — при малом числе передвижных блоков, муфт);  постоянные потери мощности на валах I, II,,,.,
постоянные потери мощности на валах I, II,,,.,
 ;
;  постоянные потери мощности на шпинделе.
постоянные потери мощности на шпинделе.
Постоянные потери мощности на валу и на шпинделе при каждой частоте вращения находят суммированием потерь в ременных и зубчатых передачах, в подшипниках и других элементах.
Постоянные потери мощности (кВт) в ременной передаче
где  коэффициент, учитывающий тип ремня;
коэффициент, учитывающий тип ремня;  число ремней (для поликлиновых ремней);
число ремней (для поликлиновых ремней);  скорость ремня, м/с;и
скорость ремня, м/с;и 
 -диаметры ведущего и ведомого шкивов, см. Для клиновых ремней
-диаметры ведущего и ведомого шкивов, см. Для клиновых ремней

Коэффициенты  и
и  для клиновых ремней связаны с сечением ремня:
для клиновых ремней связаны с сечением ремня:

Коэффициенты  и
и  для поликлиновых ремней:
для поликлиновых ремней:

Для зубчатых ремней

 |
где b — ширина ремня, мм;
 и
и  — коэффициенты, зависящие от модуля ремня т:
— коэффициенты, зависящие от модуля ремня т: Потери мощности в ременной передаче относят к ведомому валу. Постоянные потери мощности в зубчатом зацеплении, отнесенные к ведущему валу,

где С3 ~ коэффициент: для каждого колеса, не передающего крутящий момент,  для передающего
для передающего  — ширина венца зубчатого колеса, мм; v — окружная скорость в зацеплении, м/с; fi — динамическая вязкость смазочного материала, Па-с.
— ширина венца зубчатого колеса, мм; v — окружная скорость в зацеплении, м/с; fi — динамическая вязкость смазочного материала, Па-с.
Такую же потерю мощности от трения в зубчатом зацеплении относят и к ведомому валу,
Постоянные потери мощности в одном подшипнике качения
где f — коэффициент трения, зависящий от типа подшипника и способа смазывания; dm — средний диаметр подшипника, мм; v — кинематическая вязкость смазочного материала, м2/с; n - частота вращения подшипника, об/мин.
Определение нагрузочных потерь мощности. Нагрузочные потери привода определяют путем суммирования потерь мощности на каждом валу, которые слагаются из потерь в ременных и зубчатых передачах, в подшипниках и других элементах.
Нагрузочные потери мощности в клиновой или поликлиновой ременной передаче
где φ — коэффициент тяги, учитывающий предварительное натяжение ремней: для поликлиновых передач с ремнями сечений К, Л и Мφ равно соответственно 2,0; 0,8 и 0,5; F — передаваемая окружная сила, Н. Нагрузочные потери мощности в подшипнике качения
где f1 - коэффициент, учитывающий конструкцию подшипника и отношение нагрузки на него к статической грузоподъемности; Fn — приведенная нагрузка на подшипник, Н.
Определение КПД привода. Коэффициент полезного действия механической части привода можно определить по зависимости
или по выражению
 (4-3)
(4-3)
где  мощность на входном валу привода, кВт;
мощность на входном валу привода, кВт;  средние значения КПД ременной передачи, зубчатой передачи, подшипника;
средние значения КПД ременной передачи, зубчатой передачи, подшипника;  число ременных передач, зубчатых передач и подшипников качения в механической части привода. Произведение
число ременных передач, зубчатых передач и подшипников качения в механической части привода. Произведение
 (4.4)
(4.4)
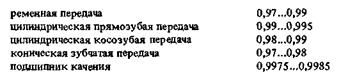
характеризует собой нагрузочные потери. Входящие в него средние значения КПД элементов привода считаются независимыми от нагрузки и скорости и принимаются равными:
Значение  , вычисленное по выражению (4.4), можно считать удовлетворительной оценкой коэффициента полезного действия односкоростных приводов при полном использовании номинальной мощности электродвигателя. Однако это значение КПД получается сильно завышенным для верхних ступеней частоты вращения при использовании приводов с большим диапазоном регулирования.
, вычисленное по выражению (4.4), можно считать удовлетворительной оценкой коэффициента полезного действия односкоростных приводов при полном использовании номинальной мощности электродвигателя. Однако это значение КПД получается сильно завышенным для верхних ступеней частоты вращения при использовании приводов с большим диапазоном регулирования.
Зависимость (4.3) дает удовлетворительные оценки коэффициента полезного действия любого главного привода со ступенчатым регулированием. При этом мощность.Pj на входном валу привода задают как долю  номинальной мощности электродвигателя Р, т.е.
номинальной мощности электродвигателя Р, т.е. 
4.12. ВЫБОР АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ДЛЯ ПРИВОДА '
Предварительный выбор двигателя. Электродвигатель для главного привода станка выбирают на стадии разработки его кинематической схемы. При проектировании специального станка для всех элементов цикла определяют эффективную мощность резания. Пользуясь кинематической схемой главного привода и зависимостью (4.4), вычисляют его коэффициент полезного действия  (или в зависимости от сложности привода принимают равным 0,75... 0,85).
(или в зависимости от сложности привода принимают равным 0,75... 0,85).
Электродвигатель выбирают по расчетной номинальной мощности:

где  максимальная мощность резания в цикле работы станка;
максимальная мощность резания в цикле работы станка;  коэффициент перегрузки:
коэффициент перегрузки:  в зависимости от режима работы двигателя.
в зависимости от режима работы двигателя.
Если при разработке главного привода универсального станка определить номинальную мощность его двигателя бывает затруднительно из-за отсутствия исходных данных, можно подобрать двигатель исходя из технических параметров лучших отечественных и зарубежных станков.
О выборе двигателя для разработанного привода. После того как механическая часть главного привода разработана, определяют постоянные  и нагрузочные
и нагрузочные  потери в ней, а также мощность на приводном двигателе:
потери в ней, а также мощность на приводном двигателе:

Если проектируют специальный станок, мощность на двигателе вычисляют для каждого элемента цикла работы станка. Двигатель выбирают с учетом режима его работы.
Выбор двигателя для работы в продолжительном режиме S1. Продолжительный режим 57 характерен для двигателей главного привода тяжелых токарных, шлифовальных и зубообрабатывающих станков. Номинальную мощность двигателя (кВт) определяют по мощности резания Р и КПД  механической части привода [ 4, 20]:
механической части привода [ 4, 20]:
 (4.5)
(4.5)
Выбор двигателя для работы в повторно-кратковременном режиме S3.
Повторно-кратковременный режим работы характерен для двигателей главного привода станков-автоматов, полуавтоматов, отрезных станков. Для них рекомендуется применять асинхронные двигатели с повышенным скольжением серии 4АС [4, 37]. Если  время работы двигателя в цикле станка (с),
время работы двигателя в цикле станка (с),  продолжительность паузы "(с),то расчетная продолжительность включения двигателя
продолжительность паузы "(с),то расчетная продолжительность включения двигателя

Когда  номинальную мощность двигателя определяют по зависимости (4.5), а двигатель выбирают по каталогу [ 27], принимая во внимание, что для них номинальным режимом работы является повторно-кратковременный при ПВ = 40 %.
номинальную мощность двигателя определяют по зависимости (4.5), а двигатель выбирают по каталогу [ 27], принимая во внимание, что для них номинальным режимом работы является повторно-кратковременный при ПВ = 40 %.
Если расчетная продолжительность включения отличается от 0,4, т.е. от ПВ = 40 %, определяют мощность, которую может развивать двигатель при расчетной продолжительности включения:
где  стандартная продолжительность включения (для двигателей серии 4АС
стандартная продолжительность включения (для двигателей серии 4АС  принята равной 0,15; 0,25; 0,40; 0,60; 1,00);номинальная мощность двигателя при стандартном ПВ, соответствующем
принята равной 0,15; 0,25; 0,40; 0,60; 1,00);номинальная мощность двигателя при стандартном ПВ, соответствующем  (кВт), приведенная в каталоге [ 27].
(кВт), приведенная в каталоге [ 27]. 
При этом εi. берут ближайшей к ε.. Двигатель выбирают по мощности Рε.
Выбор двигателя для работы в режимах S4 и S5 с частыми пусками и торможениями или реверсами. Двигатели выбирают по предельно допустимому числу пусков в час.
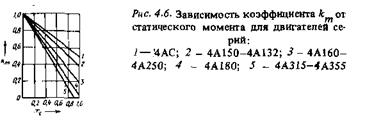
Зная заданную мощность на шпинделе станка, определяют с учетом КПД привода мощность на валу двигателя и по каталогу выбирают ближайший по мощности двигатель. По его технической характеристике, параметрам разработанной механической части главного привода, продолжительности цикла работы станка tц, времени работы двигателя в цикле и продолжительности паузы находят: продолжительность включения е; отношение статического момента сопротивления Мс к номинальному моменту Мн выбранного двигателя:  коэффициент кm (по рис. 4.6); коэффициент инерции Fi, =
коэффициент кm (по рис. 4.6); коэффициент инерции Fi, =  где /Д- момент инерции ротора двигателя, кг-м2; Iм - приведенный к валу двигателя момент инерции механизма главного привода, кг-м2; отношение суммарных потерь предварительно выбранного двигателя при номинальной мощности Р в длительном режиме работы к суммарным потерям при мощности Ре, соответствующей повторно-кратковременному режиму,
где /Д- момент инерции ротора двигателя, кг-м2; Iм - приведенный к валу двигателя момент инерции механизма главного привода, кг-м2; отношение суммарных потерь предварительно выбранного двигателя при номинальной мощности Р в длительном режиме работы к суммарным потерям при мощности Ре, соответствующей повторно-кратковременному режиму,
где η - КПД двигателя при номинальной мощности; ηε - КПД двигателя при мощности, соответствующей повторно-кратковременному режиму с продолжительностью включения 6.
Затем для предварительно выбранного двигателя по каталогу [ 27] находят условно допустимое число h0 пусков в час при отсутствии статической и динамической нагрузок. Вычисляют допустимое число h пусков двигателя в час с учетом реальных нагрузок и режима работы:
Если двигатель тормозится противовключением или реверсируется, допустимое число включений или реверсов получают делением найденного значения h на 4.
Определяют минимальную допустимую продолжительность цикла работы станка (с):
Если  больше заданной продолжительности цикла
больше заданной продолжительности цикла  , двигатель выбран неправильно. Необходимо взять более мощный двигатель и повторить для него расчет.
, двигатель выбран неправильно. Необходимо взять более мощный двигатель и повторить для него расчет.
Если заданы время разгона (пуска)  и время торможения
и время торможения  шпинделя станка, двигатель проверяют и по этим критериям. Сначала вычисляют номинальный момент двигателя (Н-м)
шпинделя станка, двигатель проверяют и по этим критериям. Сначала вычисляют номинальный момент двигателя (Н-м)
и средний пусковой момент (Н-м)

где  каталожное значение отношения максимального момента двигателя
каталожное значение отношения максимального момента двигателя  к номинальному
к номинальному  ;
;  каталожное значение отношения его пускового момента
каталожное значение отношения его пускового момента  к номинальному.
к номинальному.
Затем определяют время пуска  и время торможения
и время торможения  шпинделя, (с):
шпинделя, (с):
где  средний момент торможения, Н-м:
средний момент торможения, Н-м: 
Время реверсирования шпинделя

Если продолжительности пуска, торможения и реверсирования недопустимо велики, надо взять по каталогу следующий двигатель и повторить расчет.
Выбор двигателя для работы в перемежающихся режимах S6-S8, Эти режимы в металлорежущих станках встречаются наиболее часто. Цикл работы двигателя может включать следующие элементы: пуск для разгона шпинделя при статическом моменте сопротивления привода  и моменте инерции, приведенном к валу двигателя, равном.
и моменте инерции, приведенном к валу двигателя, равном.  ; работа при мощности на валу двигателя
; работа при мощности на валу двигателя  в течение времени
в течение времени  ; торможение противовключением; пауза в течение времени t перед изменением частоты вращения шпинделя; разгон шпинделя при
; торможение противовключением; пауза в течение времени t перед изменением частоты вращения шпинделя; разгон шпинделя при  и
и  ; работа при
; работа при  в течение времени
в течение времени  ; торможение противовключением; пауза для снятия обработанной детали и установки заготовки и др. Двигатель выбирают следующим образом.
; торможение противовключением; пауза для снятия обработанной детали и установки заготовки и др. Двигатель выбирают следующим образом.
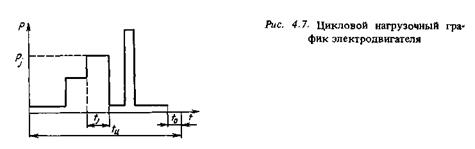
Строят цикловой нагрузочный график. Для этого на оси абсцисс откладывают продолжительности  ;-х интервалов цикла, на оси ординат — значения
;-х интервалов цикла, на оси ординат — значения  мощности двигателя в /-м интервале (рис. 4.7).
мощности двигателя в /-м интервале (рис. 4.7).
По нагрузочному графику определяют наибольшую мощность и мощность потерь в /-м интервале: 
где  КПД электродвигателя, соответствующий мощности Рj- [27].
КПД электродвигателя, соответствующий мощности Рj- [27].
Вычисляют среднюю мощность потерь за цикл работы станка:
где  число интервалов в цикле;
число интервалов в цикле;  время цикла.
время цикла.
По перегрузочной способности производят предварительный выбор двигателя по каталогу. Для этого его номинальную мощность Р определяют исходя из наибольшей мощности  в цикле работы:
в цикле работы:

где 
 коэффициент перегрузки: при предварительном выборе двигателя.
коэффициент перегрузки: при предварительном выборе двигателя.
Выбранный двигатель проверяют на нагрев по методу средних потерь. Для этого находят номинальное значение потерь мощности  в двигателе при работе с номинальной мощностью Р в режиме S1
в двигателе при работе с номинальной мощностью Р в режиме S1
и проверяют выполнение условия
 (4.6)
(4.6)
Если условие (4.6) не выполняется, предварительно выбранный двигатель для данного привода не подходит по нагреву.
По каталогу выбирают следующий, более мощный двигатель и повторяют расчет.
Более точная методика выбора двигателя включает учет потерь энергии (кДж) в нем при пуске

торможении

и реверсировании

Снижение эффективности охлаждения отключенного электродвигателя (во время паузы t о) учитывают коэффициентом β0, а при пуске и торможении (вследствие снижения частоты вращения) - коэффициентом β1, Для двигателей 4АН с Р = 1... 100 кВт и с синхронной частотой 1500 об/мин коэффициента  для двигателей
для двигателей  меньшие значения относятся к большей мощности). Коэффициент
меньшие значения относятся к большей мощности). Коэффициент 
Таким образом, уточненные средние потери мощности (кВт) в электродвигателе; за цикл работы в повторно-кратковременных режимах S4, S5
Если с учетом уточненных потерь за цикл работы условие (4.6) не выполняется, следует выбрать более мощный двигатель и повторить расчет.

