 2015-05-14
2015-05-14 4157
4157Электромеханическими характеристиками называется зависимость основных параметров стартерного электродвигателя (напряжения, частоты вращения, момента, КПД, мощности) от тока стартера Iс. Удобство использования электромеханических характеристик для анализа работы системы электростартерного пуска объясняется возможностью совмещать их с вольтамперными характеристиками аккумуляторных батарей.
Принципиальная электрическая схема включения стартера представлена на рисунке 3.
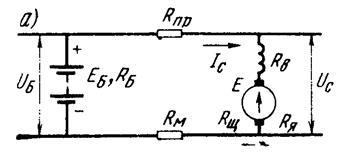
Рисунок 3 Принципиальная электрическая схема включения стартера
На рисунке 4 изображены зависимости падений напряжений на различных участках схемы в функции тока Iс. (баланс напряжений системы пуска).
Напряжение Uс, подведенное к стартеру, меньше напряжения батареи Uб на величину его падения на сопротивлениях проводов стартерной цепи RПР (ΔUПР) и «массы» Rм (ΔUм). Они в сумме составляют общие потери напряжения в стартерной цепи от аккумуляторной батареи до стартера ΔUц:

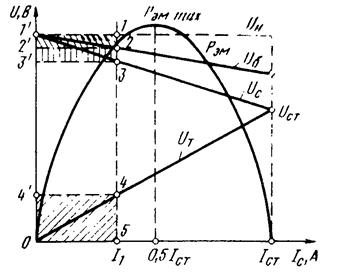
Рисунок 4 Баланс напряжений
Ток Iст соответствует полностью заторможенному якорю стартера; при этом частота вращения пс = 0. В этом режиме все напряжение, Uст, подведенное к стартеру, равно падению напряжения на его внутреннем сопротивлении:

где  — сопротивление обмоток возбуждения,
— сопротивление обмоток возбуждения,  — сопротивление обмотки якоря; 2
— сопротивление обмотки якоря; 2  — сопротивление щеток и щеточного контакта.
— сопротивление щеток и щеточного контакта.
Сопротивление зависит от частоты вращения, плотности тока под щеткой и материала щеток. В отличие от обмоток стартерного электродвигателя сопротивление является нелинейным. При нагрузках, в которых работает стартер, падение напряжения под щетками не превышает 1...2 В и мало изменяется от силы тока и частоты вращения. В этом случае можно принять, что падение напряжения на внутреннем сопротивлении стартера изменяется линейно от силы тока, потребляемого стартером (прямая UТ (/с) на рис. 4. Величину UТ называют тормозным напряжением.
Падение напряжения по участкам цепи стартера при некотором рабочем токе I1 распределяется следующим образом (см. рис. 4): 1– 5– ЭДС батареи Еб; 1 – 2– падение напряжения иа внутреннем сопротивлении батареи  ;2 – 3– падение напряжения в проводах и «массе»
;2 – 3– падение напряжения в проводах и «массе»  ; 3 — 4 — ЭДС стартера
; 3 — 4 — ЭДС стартера  , где Ф — поток возбуждения; 4 – 5– тормозное напряжение
, где Ф — поток возбуждения; 4 – 5– тормозное напряжение 
Потери мощности на отдельных участках цепи при токе  пропорциональны заштрихованной площади на рисунке 4, так как площадь графика в координатах напряжение – ток есть мощность. Площадь 3', 3, 4, 4' соответствует электромагнитной мощности, подведенной к якорю стартера,
пропорциональны заштрихованной площади на рисунке 4, так как площадь графика в координатах напряжение – ток есть мощность. Площадь 3', 3, 4, 4' соответствует электромагнитной мощности, подведенной к якорю стартера,  которая при изменении тока от 0 до Iст изменяется по параболе
которая при изменении тока от 0 до Iст изменяется по параболе
 (10)
(10)
имеющей корни Iс1 = 0 и 
Выражение (1) имеет максимум при
Кривая РЭМ (/с) изображена на рисунке 4.
Электромеханические характеристики стартера показаны на рисунке 5.
Зависимости частоты вращения пс (Iс) и момента Мс(Iс)можно разбить на два участка: первый, когда магнитная система стартера не насыщена и магнитный поток Ф с ростом тока Iс резко увеличивается [до Iс < (0,8...0,9) Iсн, где Iсн — номинальный ток стартера], и второй, когда магнитная система насыщена и магнитный поток Ф почти не изменяется (Iс > (0,8... 0,9) Iсн). Характеристики пс (Iс) и Мс(Iс) на втором участке имеют почти линейный характер.
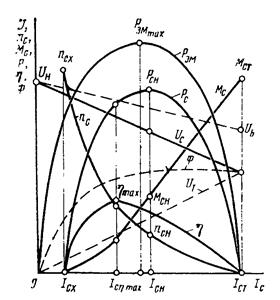
Рисунок 5 Электромеханические характеристики стартера
Механическая мощность на валу стартера:
 Вт
Вт
меньше электромагнитной мощности РЭМ на величину потерь на трение и подшипниках и щеточном контакте, вентиляционных и магнитных потерь (перемагничивание и вихревые токи). Стартер потребляет электрическую мощность
преобразовывая ее в механическую с КПД

Максимум КПД электродвигателя стартера не превышает значений 0,5...0,6. Максимум мощности Рс не совпадает с максимумом КПД. На электромеханических характеристиках стартера можно выделить следующие режимы:
холостого хода, характеризуемый частотой вращения nгх, силой тока Iсх;
режим при максимуме КПД (характеризуется током Iсη шах).
номинальный режим при максимуме мощности стартера.

