 2015-05-14
2015-05-14 3246
3246В стартерах применяются электродвигатели постоянного тока. Для анализа особенностей их работы в системе пуска рассмотрим основные характеристики электродвигателей постоянного тока, которые подразделяются на двигатели последовательного, параллельного, смешанного и независимого возбуждения. Тип возбуждения определяется схемой включения обмоток возбуждения по отношению к якорной пени. Электромеханические параметры электродвигателя определяются выражениями:
 (1)
(1)
 (2)
(2)
 (3)
(3)
где U—напряжение, подводимое к электродвигателю от источника питания; RЯ — активное сопротивление цепи якоря; Е— противо-ЭДС якоря; Ф — магнитный поток; п — частота вращения якоря; М— момент электродвигателя; Iя —ток якоря; Се. См —конструктивные постоянные;
 ;
;  ;
;
р — число пар полюсов; а — число пар параллельных ветвей обмотки якоря; N — число проводников обмотки якоря.
Из выражений (1) - (3) можно получить формулы для определения частоты вращения:
 (4)
(4)
 (5)
(5)
В электродвигателях, с последовательным возбуждением обмотка возбуждения включается последовательно с обмоткой якоря, и поэтому Iя = IВ (рис. 2, а).
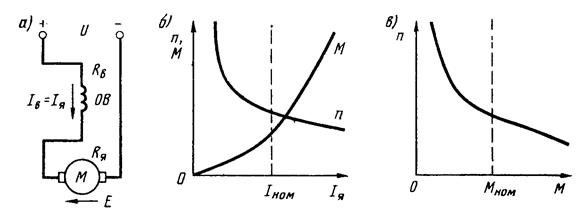
Рисунок 2 Схема двигателя с последовательным возбуждением (а) и его электромеханические (б) и механическая (в) характеристики
Следовательно, магнитный поток двигателя Ф является некоторой функцией тока якоря IЯ. Характер этой функции изменяется в зависимости от нагрузки двигателя. При токе якоря IВ < (0,8 - 0,9) Iном (Iном — номинальный ток якоря), когда магнитная система машины насыщена, можно считать, что поток линейно зависит от IЯ :
 (6)
(6)
где кф — коэффициент пропорциональности, имеющий размерность индуктивности (Гн), остается практически постоянным в значительном диапазоне нагрузок. Подставляя (6) в уравнения (3) и (4), получим токоскоростную и моментную характеристики  ,
,  в этом диапазоне
в этом диапазоне  в виде:
в виде:
 (7)
(7)
 (8)
(8)
 - постоянные, т.е. в диапазоне от 0 до Іном зависимость имеет гиперболический характер (при
- постоянные, т.е. в диапазоне от 0 до Іном зависимость имеет гиперболический характер (при  ), а зависимость - параболический (рис.2, б).
), а зависимость - параболический (рис.2, б).
При дальнейшем возрастании тока якоря поток Ф растет медленнее, чем , и при больших нагрузках ( > Іном) можно считать Ф = const.
В этом случае скоростная и моментная характеристики становятся линейными аналогично характеристикам двигателя с независимым возбуждением.
Механическая характеристика  (рис. 2, в) может быть построена на основании уравнений (7) и (8). При токе якоря, меньшем (0,8... 0,9) Іном, частота вращения изменяется по закону
(рис. 2, в) может быть построена на основании уравнений (7) и (8). При токе якоря, меньшем (0,8... 0,9) Іном, частота вращения изменяется по закону
 (9)
(9)
где  - постоянная.
- постоянная.
При токе якоря, большем Іном, зависимость становится линейной.
Из рисунке 3, в следует, что механическая характеристика двигателя с последовательным возбуждением является «мягкой». При малых нагрузках частота п резко возрастает и может превысить максимально допустимое значение (двигатель идет «вразнос»). Несмотря на этот недостаток, такие двигатели широко применяются в различных электрических приводах, где имеют место изменение нагрузочного момента в широких пределах и тяжелые условия пуска. В частности, большинство стартерных электродвигателей имеют последовательное возбуждение. Объясняется это тем, что мягкая характеристика рассматриваемого двигателя более благоприятна для указанных условий работы, чем жесткая характеристика двигателя с параллельным возбуждением.
При «мягкой» характеристике двигателя с последовательным возбуждением частота вращения п обратно пропорциональна  (12), вследствие чего
(12), вследствие чего
где  - постоянная
- постоянная
Поэтому при изменении нагрузочного момента в широких пределах, что характерно для пуска ДВС, мощность Рс, а следовательно, и электрическая мощность  , и ток у двигателей с последовательным возбуждением изменяются в меньших пределах, чем у двигателей с параллельным возбуждением. Кроме того, они лучше переносят перегрузки. Двигатель с последовательным возбуждением развивает больший пусковой момент, чем двигатель с параллельным возбуждением.
, и ток у двигателей с последовательным возбуждением изменяются в меньших пределах, чем у двигателей с параллельным возбуждением. Кроме того, они лучше переносят перегрузки. Двигатель с последовательным возбуждением развивает больший пусковой момент, чем двигатель с параллельным возбуждением.
Таким образом, в стартерах используются двигатели постоянного тока с последовательным возбуждением. В отдельных случаях, рассмотренных ниже, используются двигатели со смешанным возбуждением. В последние годы на стартерах стали применяться электродвигатели с возбуждением от постоянных магнитов, которые имеют пониженное энергопотребление вследствие отсутствия тока возбуждения. Однако такие стартеры имеют недостатки, характерные для электродвигателей независимого (параллельного) возбуждения. Кроме того, материал для изготовления постоянных магнитов еще очень дорог. Постоянные магниты используются только в маломощных стартерах.








