 2015-05-20
2015-05-20 416
416При исследовании САУ её можно разбить на комбинацию динамических звеньев с определёнными передаточными функциями.
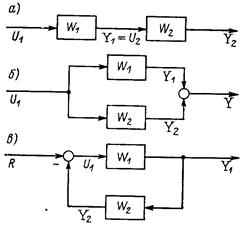
В системах автоматического управления используются следующие соединения динамических звеньев: последовательное, параллельное и соединение с обратной связью (встречнопараллельное).
При определении скалярных функций сложных систем их можно выражать через передаточные функции звеньев, из которых состоит система. Для этого необходимо знать правила определения передаточных функций последовательных и параллельных соединений, а также соединений с обратной связью.
При последовательном соединении звеньев структура аналогична изображенной на рис. 1.4, а, только теперь сигналы и передаточные функции являются скалярами:
W (s) = Y2 (s)/t/, (s) = W{ (s) W2 (s) = W2 (s) Wx (s).
При параллельном соединении (рис. 1.4,6)
W(s) = Y (s)/t/, (s) = W, (s) + W2 (s).
Для соединения с обратной связью (рис. 1.4, в)
W (s) = У, (s)/G (s) = Wx (s)/\ 1 ± Wi (s) W2 (s)].
Знак плюс в знаменателе соответствует отрицательной обратной связи, знак минус — положительной.








