 2015-05-20
2015-05-20 1785
1785Цель: ознакомление аспектами энергосбережения.
Центробежные механизмы (ЦМ) являются наиболее массовыми потребителями электрической энергии. Эти установки широко распространены во всех отраслях промышленности и выполняют как основные технологические, так и вспомогательные функции. В настоящее время регулирование режимов работы центробежных агрегатов осуществляется, в основном, с помощью регулирующей запорной арматуры – задвижек, заслонок и пр. (дросселированием) - при постоянной скорости приводного двигателя. Это приводит к значительным потерям мощности в регулирующих элементах, связанных с преодолением дополнительных гидравлических сопротивлений. Величина таких потерь зависит от глубины регулирования выходных параметров - напора и подачи и могут достигать 50%потребляемой механизмом мощности. Современный уровень развития автоматизированного электропривода позволяет передать функции управления непосредственно электроприводу центробежного агрегата и исключить указанные потери. Поскольку на долю центробежных насосов (ЦН), вентиляторов,воздуходувок и т.д. приходится, по разным источникам, 20..35% электроэнергии,потребляемой в промышленности, перевод центробежных механизмов на регулируемые системы привода является важным направлением политики энергосбережения в промышленности.
Первый и наиболее важный аспект перевода ЦМ на регулируемый привод известен давно и очевиден.
Точка А напорной диаграммы системы «насос – трубопровод», изображенной на рисунке 1, соответствует работе агрегата с открытой задвижкой.
При дросселировании на выходе насоса вводится дополнительное гидравлическое сопротивление регулятора Zгр,изменяется характеристика трубопровода и система работает в точке В, с новыми значениями H и Q.
Применяя регулируемый привод, можно напрямую плавно управлять скоростью вращения рабочего колеса ЦН и тем самым обеспечить требуемые значения расхода и подачи без использования дросселирующей арматуры. Последняя устанавливается только для вспомогательных целей и в процессе перекачки полностью открыта, что снижает гидравлическое сопротивление сети.
В этом случае снижение подачи происходит за счет уменьшения напора, создаваемого насосом (см.рисунок 2), при этом исключаются дополнительные потери мощности в гидрорегуляторе и при любом значении подачи РЦН = РТР.
Кроме снижения уровня энергопотребления, при работе насосного агрегата в режиме регулирования производительности, применение регулируемого электропривода позволяет поддерживать оптимальной частоту вращения агрегата в соответствии с заданным напором и подачей. Это приводит к значительному снижению износа запорно-регулирующей аппаратуры и кинематической части привода и насоса, утечек транспортируемой жидкости, так как значительную часть времени агрегат будет работать на пониженной частоте вращения.Возможность изменять давление в переходных режимах плавно и с заданной интенсивностью уменьшает опасность аварий на трубопроводах вследствие гидравлических ударов. Упрощается задача включения автоматизированного электропривода насосов в системы автоматического управления технологическими процессами.
При расчетах эффективности внедрения регулируемых электроприводов, часто учитывается только указанный эффект. Еще одним фактором снижения энергопотребления ЦН при регулировании производительности изменением частоты вращения рабочего колеса насоса является следующее. Паспортное значение КПД ЦН (см.рисунок 3) получено при постоянной и равной номинальной частоте вращения. Любой способ снижения подачи при ω= const приводит к снижению ηЦН. На рисунке 3 представлены значения КПД ЦН при пониженных частотах вращения,полученные с использованием формул гидравлического подобия.
Авторами отмечалось это обстоятельство,однако для сетей с противодавлением предлагались достаточно сложные методы оценки изменения КПД ЦН при регулировании частоты вращения. Поскольку потери в ЦН составляют существенную долю общих потерь агрегата, важно получить инструмент их аналитической оценки при планировании и проектировании модернизации насосных агрегатов.
Кривая КПД, рассмотренная ранее, представляет собой характеристику потерь в ЦН при постоянной частоте вращения и регулировании подачи каким - либо другим способом. При отсутствии противодавления, в соответствии с формулами подобия, значение КПД ЦН при регулировании производительности скоростью рабочего колеса, остается постоянным. При регулировании частоты вращения рабочего колеса ЦН точки установившегося режима работы расположены на характеристике трубопровода и полезная мощность равна
 . (12.1)
. (12.1)
Для обеспечения подачи Q вал вращается с частотой
и механическая мощность на валу, по закону гидравлического подобия равна
 . (12.2)
. (12.2)
Относительное значение КПД при регулировании подачи можно определить как 
 . (12.3)
. (12.3)
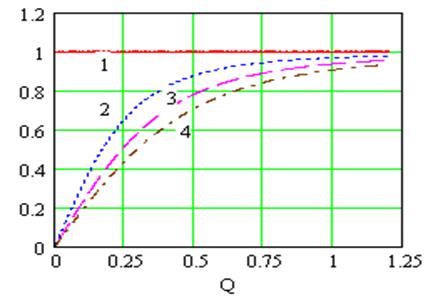
На рисунке 4 представлены расчеты мощностей и КПД ЦН при работе насоса на сеть без статического напора и с противодавлением, рассчитанные по выражениям(1), (2), (3). При НС = 0, η* = 1 во всем диапазоне регулирования подачи, при наличии противодавления КПД изменяется в соответствии с выражением (3).
1 – характеристика трубопровода; 2 – полезная гидравлическая мощность;
3 – механическая мощность на валу ЦН, 4 –относительный КПД ЦН.
Рисунок 4
На рисунке 5 приведены расчетные кривые КПД регулируемого по частоте вращения ЦН для различных значений статического напора и экспериментально полученная характеристика КПД. Рисунок иллюстрирует достаточно высокую точность предлагаемого аналитического способа расчета(погрешность не превышает 6.5%).
Абсолютное значение КПД ЦН определяется, как произведение относительного КПД на номинальное значение
 .
.
 1 – НС = 0; 2 – НС = 0.2; 3 – НС = 0.4; 4 – НС = 0.4 (эксперимент).
1 – НС = 0; 2 – НС = 0.2; 3 – НС = 0.4; 4 – НС = 0.4 (эксперимент).
Рисунок 5 – Относительный КПД ЦН при регулировании частотой вращения
Одной из наиболее эффективных возможностей энергосбережения является создание объектно - ориентированных систем электропривода, максимально учитывающих параметры и специфику работы приводного механизма.
Сопоставительный анализ систем регулируемого электропривода позволил определить два варианта, наиболее полно отвечающих специфическим особенностям работы ЦН. Это приводы на базе асинхронного двигателя – «преобразователь частоты – асинхронный двигатель» («ПЧ – АД») и схемы регулирования по цепи ротора, самым перспективным вариантом которых является машина двойного питания(МДП). Следующим этапом является оптимизация энергетических и эксплуатационных показателей этих систем электропривода при работе на центробежную нагрузку,включающая в себя выбор или разработку схемных решений, синтез законов и алгоритмов управления, минимизирующих энергопотребление.Для этого нами разработаны методы расчета и анализа электромагнитных и электромеханических процессов, эксплуатационных и энергетических показателей различных систем асинхронного электропривода в статических и динамических режимах работы центробежных механизмов.
При частотном управлении значение электромагнитного момента зависит от частоты и величины напряжения, приложенного к статору электрической машины. Законы частотного управления – это соотношения между частотой ω1 и напряжением U1,подаваемыми на статор двигателя АД, обеспечивающие заданные статические характеристики привода. Распространенным на практике является регулирование при постоянном магнитном потоке (U1/ω1=const). С точки зрения энергетики привода, этот вариант может быть использован только при постоянной нагрузке, так как с уменьшением последней поток становится избыточным, что приводит к завышению потерь и неоптимальности этого закона регулирования при переменном моменте нагрузки.
Наличие двух независимых каналов управления дает возможность реализовать в системах частотного регулирования оптимальное управление. Первым из таких вариантов является закон сохранения постоянной перегрузочной способности двигателя, предложенный академиком М.П.Костенко. Им впервые пояснено, как надо изменять напряжение, когда двигатель с номинальной частоты питания ω1Н переходит на пониженное (повышенное) значение частоты ω1,и что для выяснения нового значения напряжения необходимо учитывать свойства нагрузки. Управляя двигателем в соответствии с выражением (4) при ненасыщенной магнитной системе машины, можно сохранить практически неизменным коэффициент мощности и абсолютное скольжение привода, а его КПД независимым от изменения скорости.
Разработка энергосберегающих систем электропривода в значительной степени сводится к определению алгоритмов управления, минимизирующих потери в отдельных элементах этих систем во всех режимах их работы. Главным из таких объектов в частотно –регулируемом электроприводе ЦН является асинхронный двигатель.
Потери мощности в АД определяются, как
 , (12.4)
, (12.4)
где ∆РЭ1, ∆РЭ2 – электрические потери в обмотках соответственно статора и ротора;
∆Рст - потери в стали статора;
∆Рмех – механические потери;
∆Рдоб – добавочные потери.
Составляющие потерь имеют различную природу, различный вес в приведенном балансе и по-разному зависят от параметров и режимов работы двигателя. Анализ показывает, что в отличие от нерегулируемого АД, в двигателе с частотным управлением все составляющие потерь являются функцией частоты питающего напряжения, момента нагрузки и магнитного потока.
Автором разработана методика и программа расчета оптимального значения магнитного потока Фопт(ω) с учетом параметров АД, насоса и трубопровода.Некоторые результаты расчетов приведены ниже. На рисунке 6 приведены зависимости Фопт(ω), рассчитанные для привода ЦН по предлагаемой методике (кривая 1) и при упрощенной механической характеристике ЦН М=ω3/2 (кривая 2). Для сравнения здесь же показана кривая 3, полученная для линейной зависимости М(ω). Данные получены при весовых коэффициентах kЭ =0.55, kст =0.3.Учет параметров насоса и трубопровода позволяет в значительной мере уточнить расчет.
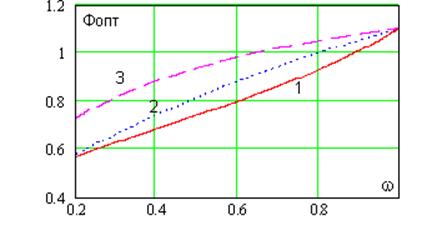 Рисунок 6 - Оптимальные значения потока частотно –регулируемого АД в приводе ЦН
Рисунок 6 - Оптимальные значения потока частотно –регулируемого АД в приводе ЦН
На рисунке 7 представлены рабочие характеристики АД –момент, полезная и потребляемая мощность, мощность потерь. При использовании предложенного оптимального, по минимуму потерь, закона частотного управления значение КПД во всем диапазоне регулирования подачи ЦН остается высоким и равным номинальному.
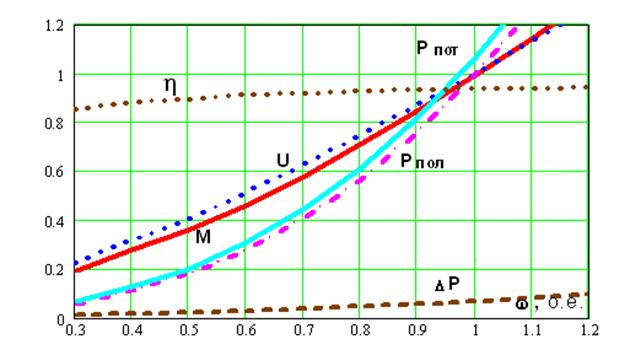 Рисунок 7 – Рабочие характеристики АД в диапазоне регулирования ЦН при оптимальном частотном регулировании
Рисунок 7 – Рабочие характеристики АД в диапазоне регулирования ЦН при оптимальном частотном регулировании
Список литературы
1.Ильинский И.Ф. Учебное пособие для ВУЗов.- М.: «Изд.дом МЭИ» 2007.
2.Ковчин С.А., Сабинин Ю.А. Теория электропривода. Учебник для вузов.Санкт-Петербург: Энергоатомиздат, 2000.
3.Чиликин М.Г., Сандлер А.С. Общий курс электропривода. Учебник для вузов - М.: Энергоатомиздат, 1986.
4. Москаленко В.В. Автоматизированный электропривод. Учебник для вузов - М.: Энергоатомиздат, 1986.
5. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. Учебник для вузов - М.: Энергоатомиздат, 1986.
6. Балагуров В.А. Проектирование специальных электрических машин. - М.: Высшая школа, 1982. –272 с.
7. Азбукин Ю.И., Аврух В.Ю. Модернизация турбогенераторов. - М.: Энергия, 1980.-232 с.
8. Ильинский И.Ф, Москаленко В.В. Электропривод.Энерго и ресурсосбережение. - М.: Изд.центр «Академия» 2008.
Содержание
Лекция 1. Особенности режимов работы центробежных агрегатов различного назначения. Насосные агрегаты магистральных трубопроводов нефтеперекачивающих станций (НПС), водоводов и т.д.
Лекция 2. Энергетические соотношения в силовом канале электропривода центробежных механизмов. Функциональная схема автоматизированного электропривода центробежного механизма. Диаграмма мощностей насосного агрегата. Соотношения гидравлической, механической и электрической мощностей в агрегате
Лекция 3. Потери мощности в центробежных механизмах. Коэффициент полезного действия центробежного насоса
Лекция 4. Способы регулирования режимов работы насосных агрегатов. Регулирование методом перепуска части подачи насоса на его вход; регулирование методом последовательного (параллельного) включения насосов; регулирование методом дросселирования трубопровода; регулирование изменением частоты вращения рабочего колеса насоса
Лекция 5. Энергетика электропривода при регулировании подачи ЦН дросселированием
Лекция 6. Энергетика электропривода при регулировании режимов работы насосных агрегатов изменением частоты вращения рабочего колеса
Лекция 7. Анализ способов регулирования частоты вращения электродвигателей насосных агрегатов. Частотно – регулируемый электропривод центробежных насосов. Регулирование частоты вращения электродвигателей изменением их скольжения. Каскадные схемы регулирования
Лекция 8. Преобразователи частоты для управления асинхронными двигателями. Электромагнитные и электромеханические процессы в электроприводе центробежных насосов по схеме «преобразователь частоты – асинхронный двигатель»
Лекция 9. Законы оптимального управления частотно – регулируемым асинхронным приводом центробежных насосов
Лекция 10. Минимизация потерь в двигателе частотно – регулируемого электропривода центробежных насосов
Лекция 11. Энергетические характеристики электроприводов центробежных насосов при несинусоидальном питании. Анализ выходного напряжения преобразователей частоты. Токи асинхронного двигателя при несинусоидальном питании
Лекция 12. Регулируемый электропривод центробежных агрегатов. Аспекты энергосбережения
Сводный план 2011г., поз. 333
Мустафин Марат Аскарович
Алмуратова Нургуль Канаевна
ЭЛЕКТРОПРИВОД НЕФТЕПЕРЕКАЧИВАЮЩИХ И КОМПРЕССОРНЫХ СТАНЦИЙ НЕФТЕГАЗОПРОВОДОВ
Конспект лекций
для магистрантов специальности
6М071800 – Электроэнергетика
Редактор Т. С. Курманбаева
Специалист по стандартизации Н.К. Молдабекова
Подписано в печать __.__.____.
Формат 60х84 1/16
Тираж 50 экз
Бумага типографская №1
Объем 3,6 уч.-изд. л.
Заказ ___. Цена 360 тг.
Копировально-множительное бюро
Некоммерческого акционерного общества
«Алматинский университет энергетики и связи»
050013, Алматы, Байтурсынова, 126








