 2015-05-13
2015-05-13 281
281При рассмотрении структур реальных систем управления и определении их динамических свойств следует учитывать существующие между элементами и звеньями связи, которые могут быть трех типов, соответствующих трем типам соединений звеньев: последовательному, параллельному и соединению с обратной связью (параллельно-встречное соединение).
1) Последовательное соединение (рис. 3.3).
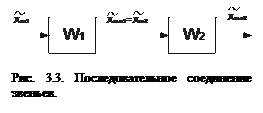 Последовательным называется соединение звеньев, при котором выходная величина предыдущего звена служит входной величиной последующего:
Последовательным называется соединение звеньев, при котором выходная величина предыдущего звена служит входной величиной последующего:
 .
.
Для определения передаточной функции последовательного соединения звеньев САУ, т.е.  , запишем уравнения связи между входными и выходными параметрами для каждого звена:
, запишем уравнения связи между входными и выходными параметрами для каждого звена:
 ;
;
 ;
;
 .
.
Т.е. передаточная функция последовательного соединения звеньев равна произведению передаточных функций составляющих звеньев. Обобщив данный результат, можно сделать вывод, что передаточная функция цепи n последовательно соединенных звеньев равна произведению передаточных функций этих звеньев:
 .
.
Для частотных функций последовательно соединенных звеньев можно записать:
 ;
;
 ;
;
 .
.
Очевидно, что даже при таком простом виде соединения суммарные свойства системы могут качественно измениться.
2) Параллельное соединение (рис. 3.4).
Параллельным называется соединение звеньев при котором входная величина имеет одинаковое значение для всех звеньев, а выходная величина равна сумме выходных величин звеньев.
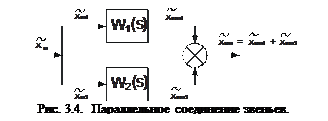 |
Передаточная функция параллельного соединения звеньев равна сумме передаточных функций составляющих звеньев:
 .
.
Наиболее широкое применение этот вид соединения находит в задачах компенсации инерционности элементов.
Пример
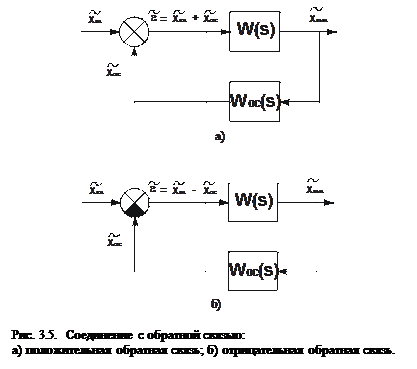
3) Соединение с обратной связью звеньев (рис. 3.5).
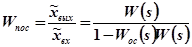
Соединение с обратной связью имеет прямую цепь передачи сигналов и цепь обратной связи, которая может быть положительной и отрицательной. При положительной обратной связи входная величина складывается с выходной величиной цепи обратной связи (см. рис. 3.5,а). При отрицательной обратной связи из входной величины вычитается выходная величина цепи обратной связи (см. рис. 3.5,б). Для определения результирующей передаточной функции такого соединения звеньев запишем следующие очевидные соотношения (на примере отрицательной обратной связи):
 ;
;
 ;
;
 ;
;
 ;
;
 |
 . (3.1)
. (3.1)
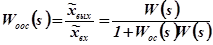
Для положительной обратной связи можно записать:
 .
.
Различают местную и общую обратные связи. Следует также заметить, что введение отрицательной обратной связи стабилизирует систему автоматического управления (т. е. повышает её устойчивость).
Кроме того, что обратные связи можно классифицировать как положительные и отрицательные, они могут быть ещё разделены на жёсткие и гибкие. Если обратная связь представляет собой усилительное звено, т. е.  (или в частном случае
(или в частном случае  ), то она называется жесткой обратной связью.
), то она называется жесткой обратной связью.
Если в цепи обратной связи имеются операторы дифференцирования, т. е. передаточная функция  содержит операторы Лапласа
содержит операторы Лапласа  , то обратная связь называется гибкой.
, то обратная связь называется гибкой.








