 2015-05-26
2015-05-26 770
770Принципиальная возможность регулирования угловой скорости асинхронного двигателя изменением частоты питающего напряжения  следует непосредственно из выражения:
следует непосредственно из выражения:
 .
.
Питание асинхронных двигателей осуществляется при этом не от общей сети, а от преобразователя частоты ПЧ, показанного на рис. 6.5, энергия к которому подводится от сети постоянной частоты f1С и напряжения U1С. На выходе преобразователя, как правило, меняется не только частота f1, но и напряжение U1. Для преобразования частоты могут быть использованы электромашинные или полупроводниковые устройства, различающиеся по принципу действия и конструкции.
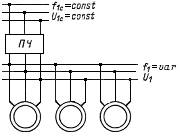
Рисунок 6.5 – Схема включения асинхронных двигателей, получающих питание от преобразователя частоты
При регулировании частоты возникает также необходимость регулирования напряжения источника питания. Действительно, э. д. с. обмотки статора асинхронного двигателя пропорциональна частоте и потоку:
С другой стороны, пренебрегая в первом приближении падением напряжения на сопротивлениях обмотки статора, т. е. полагая  , можно записать:
, можно записать:

Или 
Из приведенного выражения следует, что при неизменном напряжении источника питания  и регулировании его частоты изменяется магнитный поток асинхронного двигателя. В частности, уменьшение частоты приводит к возрастанию потока и как следствие к насыщению машины и увеличению тока намагничивания, что связано с ухудшением энергетических показателей двигателя, а в ряде случаев и с его недопустимым нагревом. Увеличение частоты приводит к снижению потока двигателя, что при постоянном моменте нагрузки на валу в соответствии, с выражением
и регулировании его частоты изменяется магнитный поток асинхронного двигателя. В частности, уменьшение частоты приводит к возрастанию потока и как следствие к насыщению машины и увеличению тока намагничивания, что связано с ухудшением энергетических показателей двигателя, а в ряде случаев и с его недопустимым нагревом. Увеличение частоты приводит к снижению потока двигателя, что при постоянном моменте нагрузки на валу в соответствии, с выражением  приводит к возрастанию тока ротора, т. е. к перегрузке его обмоток по току при недоиспользованной стали. Кроме того, с этим связано снижение максимального момента и перегрузочной способности двигателя. Для наилучшего использования асинхронного двигателя при регулировании скорости изменением частоты необходимо регулировать напряжение одновременно в функции частоты и нагрузки.
приводит к возрастанию тока ротора, т. е. к перегрузке его обмоток по току при недоиспользованной стали. Кроме того, с этим связано снижение максимального момента и перегрузочной способности двигателя. Для наилучшего использования асинхронного двигателя при регулировании скорости изменением частоты необходимо регулировать напряжение одновременно в функции частоты и нагрузки.
Регулирование напряжения лишь в функции одной частоты с учетом характеристики механизма может быть реализовано в разомкнутых системах частотного управления.
Регулирование напряжения в функции нагрузки можно осуществить, как правило, лишь в замкнутых системах, в которых при использовании обратных связей напряжение при данной частоте может изменяться в зависимости от нагрузки.
По мере снижения частоты при  падает доля э. д. с. по отношению к приложенному напряжению вследствие относительного возрастания падения напряжения в сопротивлении статора с ростом нагрузки, что приводит к уменьшению магнитного потока, а, следовательно, к снижению электромагнитного момента. Как следствие убывания магнитного потока и абсолютного критического скольжения по мере снижения частоты падает максимальный момент и снижается жесткость механических характеристик (см. рис. 6.6).
падает доля э. д. с. по отношению к приложенному напряжению вследствие относительного возрастания падения напряжения в сопротивлении статора с ростом нагрузки, что приводит к уменьшению магнитного потока, а, следовательно, к снижению электромагнитного момента. Как следствие убывания магнитного потока и абсолютного критического скольжения по мере снижения частоты падает максимальный момент и снижается жесткость механических характеристик (см. рис. 6.6).
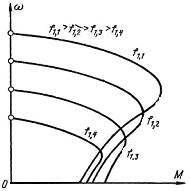
Рисунок 6.6 – Механические характеристики асинхронного двигателя при частотном управлении по закону .
Изменение частоты источника питания позволяет регулировать скорость асинхронного двигателя как выше, так и ниже основной. Обычно при регулировании выше основной скорости частота источника питания превышает номинальную не более чем в 1,5  2 раза. Указанное ограничение обусловлено, прежде всего, прочностью крепления обмотки ротора. Кроме того, с ростом частоты питания заметно увеличиваются величины мощности потерь, связанные с потерями в стали статора. Регулирование скорости вниз от основной, как правило, осуществляется в диапазоне до 10 15. Нижний предел частоты ограничен сложностью реализации источника питания с низкой частотой, возможностью неравномерности вращения и рядом других факторов. Таким образом, частотное регулирование скорости асинхронного двигателя может осуществляться в диапазоне до 20–30.
2 раза. Указанное ограничение обусловлено, прежде всего, прочностью крепления обмотки ротора. Кроме того, с ростом частоты питания заметно увеличиваются величины мощности потерь, связанные с потерями в стали статора. Регулирование скорости вниз от основной, как правило, осуществляется в диапазоне до 10 15. Нижний предел частоты ограничен сложностью реализации источника питания с низкой частотой, возможностью неравномерности вращения и рядом других факторов. Таким образом, частотное регулирование скорости асинхронного двигателя может осуществляться в диапазоне до 20–30.
Частотное регулирование угловой скорости асинхронных двигателей широко применяется в индивидуальных установках, когда требуется получение весьма высоких угловых скоростей (например, для центрифуг, шлифовальных станков, для привода электрошпинделей в металлорежущих станках с частотой вращения до 20 000 об/мин).
Экономические выгоды частотного регулирования особенно существенны для приводов, работающих в повторно-кратковременном режиме, где имеет место частое изменение направления вращения с интенсивным торможением.








