 2015-05-26
2015-05-26 1776
1776Если регулировать напряжение, подводимое к трем фазам статора асинхронного двигателя, то можно, пренебрегая влиянием регулирующего устройства на характеристики двигателя, изменять максимальный момент, не изменяя критического скольжения. Для изменения напряжения на зажимах статора могут использоваться различные устройства: автотрансформаторы, дроссели насыщения, тиристорные регуляторы напряжения.
В случае ненасыщенной магнитной цепи машины максимальный момент при пониженном напряжении снижается пропорционально квадрату напряжения:
где  ,
,  – соответственно максимальные моменты, развиваемые двигателем при сниженном и номинальном напряжениях;
– соответственно максимальные моменты, развиваемые двигателем при сниженном и номинальном напряжениях;  ,
,  — соответственно пониженное и номинальное напряжения.
— соответственно пониженное и номинальное напряжения.
Критическое скольжение, не зависящее от напряжения, остается неизменным. Не изменяется также и синхронная угловая скорость, которая зависит только от частоты питающего напряжения и числа пар полюсов двигателя.
Регулирование угловой скорости двигателя при этом способе происходит за счет уменьшения модуля жесткости механических характеристик и осуществляется вниз от номинальной угловой скорости. Плавность регулирования определяется плавностью изменения напряжения; при применении тиристорного регулятора напряжения угловая скорость регулируется бесступенчато.
Механические характеристики двигателя с короткозамкнутым ротором при регулировании напряжения на статоре приведены на рис. 6. Из этих характеристик следует, что пределы регулирования весьма ограничены даже при использовании вентиляторной нагрузки, но они могут быть существенно расширены в замкнутых системах электропривода. В действительности вследствие уменьшения критического скольжения из-за влияния параметров регулирующего устройства пределы регулирования в разомкнутых системах еще уменьшаются.
Так как большие потери мощности скольжения в двигателе с короткозамкнутым ротором выделяются в самом роторе, то допустимый момент резко уменьшается по мере роста скольжения, поэтому такой неэкономичный способ регулирования угловой скорости асинхронного двигателя с короткозамкнутым ротором можно использовать только при малой мощности двигателя и в кратковременном режиме работы.
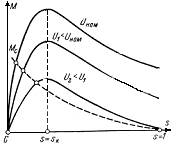
Рисунок 6.3 – Механические характеристики двигателя с короткозамкнутым ротором при регулировании напряжения на статоре
Лучшее использование двигателя и более благоприятные характеристики могут быть получены, если применить двигатель с фазным ротором, в роторную цепь его включить дополнительный нерегулируемый резистор и регулировать напряжение на статоре (рис. 6.4, а). Механические характеристики для рассматриваемого способа приведены на рис. 6.4, б. Преимущество этого способа по сравнению с реостатным заключается в том, что управление двигателем осуществляется плавно и исключается контактная аппаратура в роторной цепи.
Потери энергии в приводе получаются примерно такими же или несколько больше, как и при реостатном регулировании; потери мощности скольжения в основном выносятся из двигателя и выделяются в дополнительном резисторе, что увеличивает допустимый момент. Этот способ может быть использован при вентиляторной нагрузке для продолжительного режима, а при Мс = const для кратковременного режима работы. Очевидно, что регулирование изменением напряжения может быть осуществлено только вниз от основной угловой скорости.
Механические характеристики (рис. 6.4, б) по мере снижения напряжения становятся мягкими и не обеспечивают стабильности угловой скорости при возможном отклонении нагрузки. Кроме того, наличие постоянно включенного резистора приводит к недоиспользованию двигателя по скорости (угловая скорость всегда меньше номинальной) и по мощности. Повышение стабильности угловой скорости и расширение диапазона регулирования до (5  10):1 достигается в замкнутых системах.
10):1 достигается в замкнутых системах.
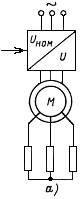
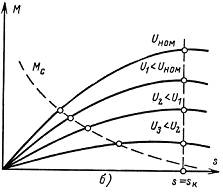
Рисунок 6.4 – Схема включения двигателя с фазным ротором с нерегулируемым резистором в роторной цепи и регулированием напряжения на статоре (а) и механические характеристики (б)
Для регулирования напряжения используются как тиристорные регуляторы напряжения с фазовым управлением, так и реакторы насыщения, автотрансформаторы и импульсные, например тиристорные или контактные регулирующие устройства. Если регулирование скорости осуществляется с помощью тиристорного регулятора напряжения с фазовым управлением, то возникают дополнительные потери в двигателе, обусловленные высшими гармониками в кривой напряжения. Потери в меди статора и ротора за счет высших гармоник возрастают в среднем на 10%. Общие электромагнитные потери в меди и стали двигателя, рассчитанные с учетом высших гармоник, возрастают не более чем на 10—12% по сравнению с общими потерями, определенными при синусоидальном напряжении.

