 2015-05-30
2015-05-30 946
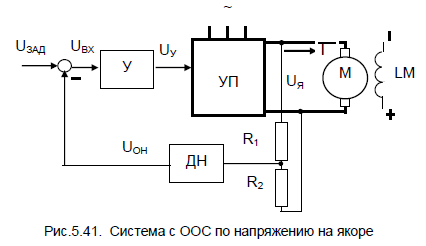
946напряжению на якоре. Функциональная схема системы электропривода с
отрицательной обратной связью по напряжению приведена на рис.5.41.
Управляемый преобразователь УП обеспечивает регулирование
напряжения на якоре двигателя. Сигнал обратной связи по напряжению на
якоре снимается с потенциометра R1 – R2. Датчик напряжения ДН
осуществляетпотенциальноеразделение силовойцепи и цепиуправленияпреобразователем.При увеличениимомента на валу
двигателя увеличи-вается ток якоря I,возрастает падениенапряжения на внут-реннем сопротивле-нии преобразовате-ля, а напряжение наякоре двигателя UЯ
уменьшается. Уменьшается напряжение UОН на выходе ДН, а сигнал рассогла-
сования UВХ = UЗАД – UОН увеличивается. В результате растет напряжение
управления UУ преобразователя и увеличивается его ЭДС, компенсируя паде-
ние напряжения внутри преобразователя.
Получим выражение электромеханической характеристики двигателя ω = f(I)
в системе с ООС по напряжению.
Уравнения для статики
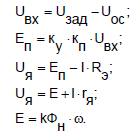
В полученном выражении скорость идеального холостого хода ωО опреде-
ляется напряжением задания UЗАД. Точность поддержания скорости Δω зависит
от контурного коэффициента усиления kУ·kП·kОН.
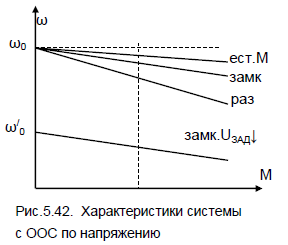
В разомкнутой системе кОН = 0,точность поддержанияΔωРАЗ = ΔωRэ + Δωrяопределяется сопротивлением якор-ной цепи RЭ + rЯ. В замкнутой систе-
ме при кОН = ∞ отклонение скоростизависит только от невыключаемогосопротивления rЯΔωЗАМК = Δωrя,то есть определяется естественной
характеристикой двигателя.При kОН → ∞ механическая ха-рактеристика приближается к есте-ственной характеристике двигателя
(рис.5.42). Система обеспечивает постоянство напряжения на якоре, точность –
не велика, диапазон – небольшой, до 10:1.Достоинства – простота, нет дополнительных сложных устройств (только
делитель и датчик напряжения ДН). Предельная жёсткость – естественная ха-рактеристика двигателя.Для увеличения точности поддержания скорости и диапазона регулирова-ния требуется применять системы с обратной связью по выходному параметру.
3.Схема нереверсивного управления с короткозамкнутым двухскоростным асинхронным двигателем с двумя обмотками на статоре на разное число полюсов.








