 2015-05-30
2015-05-30 2257
2257Оценка мышечной силы человека является задачей, к которой обращаются антропометристы, биомеханики, физиологи и ортопеды. Данные о силе представляют особый интерес для инженеров по дизайну оборудования и рычагов, которые приводятся в действие напряжением мышечной силы. Под силой здесь понимается усилие или момент, которые могут быть переданы (обычно с помощью руки или ноги) внешнему объекту при помощи одного произвольного усилия.
2.4.1. Развитие усилия
При современной технологии не существует средств для надежного измерения in vivo величины сократительного усилия, развиваемого мышцей: не существует «датчика силы», который можно было бы поместить в мышцу или в место прикрепления ее сухожилия к кости, для прямого измерения развиваемой силы. Следовательно, необходимо измерять силу косвенно, т. е. как результат действия (неизвестной) мышечной силы М, тяну щей при помощи рычага I и поворачивающей часть тела вокруг его ближайшего сустава против известного внешнего сопротивления. Это показано на рис. 2.2 на примере двуглавой мышцы, вращающей предплечье в локтевом суставе. Как показывает этот эскиз, даже при (неверном) допущении постоянства мышечного усилия величина развиваемого момента зависит от изменяющегося плеча рычага, соединяющего под прямым углом вектор силы и локтевой сустав. На рис. 2.3 иллюстрируются условия этой биомеханической задачи в деталях. Видно, что истинное направление вектора силы сокращения М составляет угол р с его векторной компонентой S, перпендикулярной к плечу рычага I. Конечно, угол и величина силы сокращения мышцы М зависят от локтевого угла а. Величины S, М и (} неизвестны и не могут быть измерены непосредственно. Даже плечо рычага / определить нелегко. Однако всем этим величинам противодействует внешняя, поддающаяся измерению сила Н, приложенная в данном случае у кисти. Эта сила Я действу ет с.известным плечом рычага / относительно локтевого сустава.'
Для равновесия верно следующее:
T=Sf, T= где P=M*cosβ. Отсюда T=Sf= Pl, Выражение для силы кисти имеет вид
S-(M/f) cosβ,
А для силы сокращения мышцы
M=Sf/(l cos β)
Конечно угол β зависит от существующих анатомических условий и локтевого угла α.
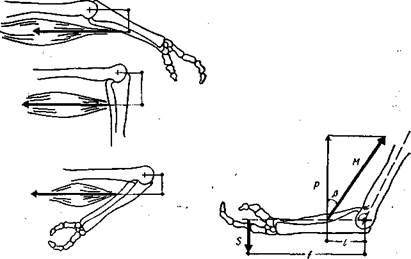 |
Рис. 2.2. Геометрия приложения усилия двуглавой мышцы, определяющая плечо рычага в зависимости от локтевого угла.
Рис. 2.3. Мышечные и внешние моменты.
внешних _масс, вовлеченных в этот процесс, является довольно-сложным. Наоборот, если мышечный момент слабее, чем действующий извне момент, мышцы, сокращаясь, начинают растягиваться. Это называют эксцентричным движением. Это движение также может быть довольно сложным. Однако, если имеется равновесие между мышечным и внешним моментами, длина мышцы не изменяется. Этот случай называют изометрическим мышечным сокращением, причем условия равновесия между силами и моментами соответствуют довольно простой задаче
статики.
Развиваемое усилие является функцией навыка человека расположить тело так, чтобы были использованы максимальные силовые возможности при наилучшем отношении рычагов, а выбранная опора такова, чтобы наибольшим i развиваемым силам соответствовали подходящие силы реакции на данных поверхностях опоры. Кроме того, необходимо делать точный хрономет-
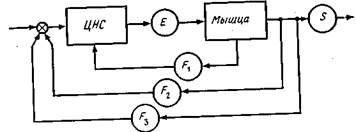
Рис. 2.4. Модель генерация мышечного усилия [7, с изменениями]. (С разрешения общества Human Factors Society.)
раж использования мышечной кинетической и зависящей от положения статической энергии. На рис. 2.4 изображена простая модель регуляции мышечного усилия. Чтобы развить усилие S (такое, которое прикладывается к рычагу управления или динамометру), запрашивается выученная или врожденная «программа исполнения» в центральной нервной системе (ЦНС). Чтобы приспособить ее к данной ситуации, для модификации этой общей программы применяются «подпрограммы» по эфферентным путям Е, затем посылаются импульсы возбуждения к соответствующим мышцам. (За этими импульсами можно следить, регистрируя электромиограмму — ЭМГ.) В данной мышце для сокращения возбуждаются иннервированные мышечные волокна. В зависимости от способности мышцы, механического выигрыша (как только что обсуждалось) и других переменных развивается соответствующая величина усилия S по отношению к внешнему объекту.
Результаты запрограммированных возбуждений контролируются,с помощью нескольких систем афферентной обратной свя-• зи F, три из которых изображены на рис. 2.4. Наиболее короткой и прямой является петля рефлексного типа, которая использует первичные тельца Руфини в суставах тела, а также органы Гольджи и веретена в мышце, которые сообщают о положении, длине и напряжении, генерируемом при мышечном усилии. Вторая петля обратной связи использует экстерорецепторы. Они, являясь в основном кинестетическими, сообщают об ощущениях прикосновения и давления на поверхности тела со стороны внешних объектов. Третья петля обратной связи также использует сигналы экстерорецепторов, сообщающие о зрительных и звуковых сигналах. Любые отклонения афферентных сигналов, приходящих от этих рецепторов, сравниваются с хранящимися ожидаемыми значениями, и если они отличаются от этих значений, то проводится коррекция эфферентных сигналов, генерируемых в ЦНС.
Даже такая простая модель контроля за мышечным усилием дает информацию о том, как влиять на приложение усилия и контролировать его, показывает, что слежение (посредством ЭМГ) за сигналами, посылаемыми по эфферентным путям к мышце, не дает точной величины действительно развиваемого усилия, так как результирующая сила мышцы изменяется в зависимости от тренировки, утомления, длины и геометрии приложения усилия. Эта модель также показывает, что можно влиять i на развиваемое усилие, манипулируя экстерорецепторной обратной связью. Например, человек, которому не давали зрительной и слуховой информации о его действительных результатах, обнаружил бы, что довольно трудно развивать ту же самую, близкую к максимуму силу повторно.
Все измерения мышечного усилия испытывают на себе влияние мотивации. Субъект решает сознательно или интуитивно, какой процент максимально возможного усилия будет составлять сила в данной ситуации. Этот факт нашел отражение в термине «максимальное произвольное сокращение» (МПС).Повышенная мотивация может приводить к экстраординарным проявлениям силы, таким, как у матери, поднявшей автомобиль, под которым находилось ее дитя. Чувство опасности или соревнование могут вести к очень высокой мотивации с возможностью повредить мышцы или сухожилия и их соединения с костями., Наоборот, другие экспериментальные ситуации могут заставлять субъекта показывать только часть возможной силы; в особой ситуации испытуемый может захотеть, чтобы экспериментатор поверил, что он может развивать сравнительно небольшое усилие, чтобы получить незаслуженную компенсацию за якобы произошедшую утрату физических способностей в результате перенапряжения. (Тестирование без обратной связи может раскрыть это — см. выше.) Главное — это то, что в настоящее время все способы измерения силы зависят от сознательного участия в них субъекта.
2.4.2. Методы измерения
Так как статический случай (постоянная длина мышцы и, следовательно, отсутствие движения) является очень простым, то большинство измерений мышечной силы проводили с мышцами, сохраняя их длину постоянной в процессе изменения усилий. Однако в действительности многие мышцы развивают усилия не в изометрических (статических) условиях, а во время движения. Поэтому следует рассматривать перемещение мышцы вместе с его производными по времени, т. е. скоростью, ускорением и т. п. Из-за того что эти величины должны, вероятно, изменяться при движении, со временем возникают довольно сложные физические и физиологические условия, которые трудно контролировать и оценивать.
Один простой способ измерения мышечной способности состоит в определении максимальной величины массы (веса) груза, который может поднять человек. Этот способ раньше называли изотоническим тестом; однако это неверный термин, потому что при постоянном внешнем грузе никакого «постоянного тонуса» мышца не генерирует. Поэтому этот вводящий в заблуждение термин больше не используется; он заменен на более подходящий термин изоинерциальный, который означает, что энергия мышцы передается постоянной внешней массе. Преимуществом инерциального метода является его простота, например в тестах с определением способности поднятия [9]. Однако изоинерциальный тест не дает возможности непосредственного измерения (в ньютонах или ньютонах на метр) действительно развиваемой силы или момента.
Другой способ контролировать условия измерения силы состоит в том, чтобы поддерживать постоянной первую производную смещения, т. е. скорость. Этот способ называют изокинетческим. В течение последних десяти лет были разработаны измерительные приборы, которые позволяют изменять угловые смещения с постоянной скоростью, даже если к прибору прикладывают большие значения момента. Это позволяет измерять истинное значение развиваемого момента, в то время как прибор и прикрепленная к нему часть тела движутся с постоянной угловой скоростью; однако возникают проблемы в начале и конце движения, когда эта часть тела должна быть ускорена для достижения требуемой скорости или замедлена в конце движения. До последнего времени объем опубликованных данных по изокинетическим усилиям был относительно невелик [3].
Сила мышцы является сложной функцией присущих мышце
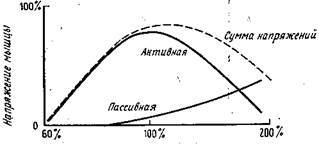
возможностей геометрии приложения усилия, навыка и мотивации. При активизации мышц возникает лишь их сокращение, однако мышцы можно растягивать внешним усилием, которому они сопротивляются, когда развивают напряжение. Следовательно, напряжение мышцы зависит также от ее длины. На рис. 2.5 схематически показана связь между длиной и силой. Очевидно, мышца не может сокращаться активно, когда ее дли
на меньше самой короткой из возможных. Ее наибольшая сила
активного сокращения развивается при длине, близкой длине
покоящейся мышцы. (При чрезмерном растяжении мышца или
прикрепления сухожилий могут быть повреждены.) Поэтому
•:••:>.:••.:.-. Длина 'в состоянии покоя
Рис. 2.5. Зависимость развиваемого мышцей усилия от ее длины.
полная сила, которая может развиваться мышцей, равна сумме активного сокращения и пассивного сопротивления внешнему растяжению. Наибольшая мышечная сила как результат этого сложения имеет место при длине, равной около 120% от длины покоящейся мышцы.
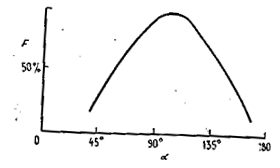
Максимальная сила, которую может развивать стопа или кисть, зависит от усилия напрягаемых мышц и относительного расположения соответствующих конечностей. Положения этих звеньев определяют геометрию приложения усилия путем изменения плеч рычагов при изменении относительных смещений •частей тела. Таким образом, существует взаимодействие между Геометрией и положением частей тела и силовыми возможности-1,Ми вовлеченных мышц, как это изображено на рис. 2.3—2.5. Комбинация этих переменных обычно приводит к результирующим кривым для силы или момента, схематически показанным «а рис. 2.6. Развиваемое усилие при подъеме тяжестей обычно Довольно мало вблизи крайних положений частей тела и увеличивается в промежуточных положениях. Однако не следует полагать, что максимальная сила обязательно достигается лишь где-то в среднем положении; например, при разгибании коленного сустава и надавливания вперед ступней (например, когда водитель автомобиля сильно давит на педаль) максимальная.направленная вперед сила достигается при почти полностью
разогнутом колене.
К сожалению, данные о силовых возможностях мышц чело-река не так легко применять на практике, как хотели бы многие инженеры. В руководстве по проектированию [15] и справочнике NASA [11] приведены весьма детальные данные о статических усилиях, измеренные при различных экспериментальных условиях. Эти условия включают самые разные позы тела (стоячую и сидячую), опоры тела (силы реакции), взаимодействие с измеряющим прибором (конфигурацию и положение педали или ручки), пол (большинство данных было собрано для мужчин, однако имеются данные и для женщин), вовлеченные скелетно-мышечные компоненты и т. п. Ясно, что эти данные представляют изолированные друг от друга условия, и инженер, пытаясь использовать их, должен убедиться, что обстоятельства, для которых ищут силовые данные, действительно достаточно аналогичны тем, при которых эти данные были измерены в соответствии с представленными в справочнике.
Так как всеобъемлющий набор данных отсутствует, проектировщику следует прибегать либо к самостоятельным измерениям силовых возможностей при условиях, существующих в данном случае, либо к помощи эргономических лабораторий, в которых такие данные обычно измеряются. Кроме промышленных или государственных (в большинстве случаев военных) учреждений большими эргономическими лабораториями обладают несколько университетов, например:
Рис. 2.6. Зависимость силы F, развиваемой при огибании локтя, от локтевого угла а.
| SUNYAB Professor С. G. Drury IE Department Afflherst, NY 14260 TexasTech University Professor M. M. Ayoub IEOR Department Lubbock, TX 79409 |
University of Michigan Professor D. B. Chaffin IOE Department Ann Arbor, MI 48109 Virginia Tech (VPI) • Professor K.H.E. Kroemer IEOR Department Blacksbourg, VA 24061
Другие адреса можно получить в организации Human Factors Society (1124 Montana Avenue, Santa Monica, С A 90406), или в ассоциации American Industrial Hygiene Association (475 Wolf Ledges Parkway, Akron, OH 44311-1087).

