 2015-05-30
2015-05-30 637
637Выше упоминалось о двух примерах рабочих положений: водитель транспортного средства, давящий ногой на педаль и одновременно стабилизирующий тело (т. е. обеспечивающий силу реакции), упираясь спиной в спинку кресла; человек, пытающийся надавливать руками, располагающий тело так, чтобы обеспечить наилучшую реакцию, включая размещение ступней на полу с их фиксацией, если это возможно, с помощью твердого упор'а. В каждом случае считается, что сила, развиваемая ступеней или кистью, должна передаваться через все вовлеченные части тела до тех пор, пока надлежащая сила реакции не будет создана внешним объектом. Третий закон Ньютона ут-, верждает, что развиваемая сила может быть только такой же величины, что и противодействующая. Ранее упоминавшаяся модель звено — сустав — мышца отражает последовательность соединенных звеньев тела, которые передают все генерируемые силы от точки их приложения до точки опоры тела.
На рис. 2.7 изображена кинематическая цепь для случая,
- когда человек пытается что-то поднять или нажать руками,
стоя на наклонной поверхности. Силы кистей рук могут быть
направлены в горизонтальном или вертикальном направлении.
Они создают моменты относительно сустава запястья. Эти мо
менты должны передаваться через локоть (Л), плечо (П) и
• вдоль шейного (Ш), грудного (Г) и поясничного (ПН) отделов
позвоночника. Затем момент передается через бедренный (Б),
коленный (К) и лодыжечный (ЛД) суставы и, наконец, встре-
/чается со своим противодействием у стопы (С), где он может •' снова быть разложен на горизонтальную и вертикальную силы, с соответствующими плечами рычагов.
В этой цепи самое слабое звено определяет величину силы или момента, которые могут быть переданы наружу. Если, на-•пример, геометрия приложения усилий у плеча будет неподхо-
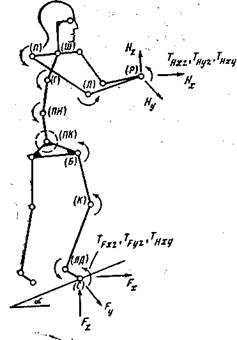 Рис. 2.7. Сила, передаваемая
Рис. 2.7. Сила, передаваемая
рукой и-, встречающая проти
водействие, передаваемое; че
рез стопу..:••
дящей, то момент, который может здесь создаваться, будет лимитирующим для всей системы. Или если поясничный отдел позвоночника сможет переносить только ограниченное напряжение, то эта область составит слабое звено в общей цепи. Наконец, угол наклона а плоскости, на которой покоится стопа, и коэффициент трения определяют способность всей системы передавать силу или момент кистям рук.
Основу вычислительного анализа для этой системы дает ряд уравнений:
HX+FX = 0, Hy+Fy=0, Я2+^2=0,
Тцхг-\-Трхг = 0, Тнуг-\-Труг = 0, Тнху-^-Трху = 0-
Коэффициент трения \l и угол наклона пола а определяют уравнения вблизи стопы:
Fx = цР2 cos a, [As^l.
Конечно, если необходимо рассматривать движение, то следует
использовать динамические уравнения в соответствии со вторым
законом Ньютона..„__^j








