 2015-06-04
2015-06-04 1762
1762В промышленности широко используется трехфазный электрический ток вследствие относительной легкости трансформирования его напряжения и сравнительной дешевизны передачи на большие расстояния. Поэтому и для станков применяют главным образом асинхронные электродвигатели трехфазного тока с короткозамкнутым ротором. Эти электродвигатели просты, надежны в эксплуатации и не нуждаются в пусковом реостате. Характерной особенностью двигателей этого типа является также незначительное изменение скорости вращения ротора при переменной нагрузке. Эти двигатели выпускаются с напряжением 127, 220, 380 и 500 в с промышленной частотой 50 гц. Такого типа двигатели малой мощности допускают от 300 до 600 включений в час.
В каталогах и справочниках указываются основные характеристики и габаритные размеры двигателей, а также необходимые размеры присоединительных поверхностей, например размеры фланцев фланцевых электродвигателей. В каталогах указывается номинальная мощность, при которой двигатель может нормально работать продолжительное время с максимальной нагрузкой.
В качестве силового привода к приспособлениям электродвигатели используются, как правило, через промежуточные механические устройства, преобразующие вращательное движение ротора электродвигателя в поступательное движение исполнительного, например, зажимного механизма. Поэтому такие приводы называются электромеханическими. Имеются приспособления, в которых вращательное движение ротора не преобразуется в поступательное (например, шлифовальные головки типа “фортуна”), но эти приспособления правильнее отнести к группе вспомогательного инструмента.
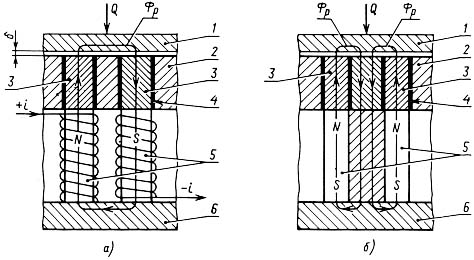
Рис. 31.Электромагнитные приводы:
a - электромагнитное приспособление (1 - обрабатываемая деталь; 2 - адаптерная плита; 3 - магнитопровод; 4 – прокладка; 5 - электромагнитные катушки; 6 - основание приспособления);
б - магнитное приспособление с постоянными магнитами (1 - обрабатываемая деталь; 2 - адаптерная шита; 3 - магнитопровод; 4 - прокладка; 5 - постоянный магнит; 6 - основание).
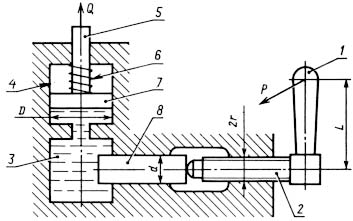
Рис. 32. Механогидравлический привод
(1 - рукоятка; 2- винт; 3 - резервуар; 4 - цилиндр; 5 - шток; 6 - пружина; 7 - поршень; 8 - плунжер). Q - сила на штоке гидроцилиндра; Р - усилие на рукоятке; d - диаметр плунжера; L - длина рукоятки; г - радиус винта; D - диаметр поршня.








