 2015-06-05
2015-06-05 5382
5382Двигатель (поворотный стол) серии RT24-93-HS с полым роторомсостоит из неподвижного статора с залитой теплопроводящим компаундом трехфазной системой обмоток и вращающегося ротора. Равномерность перемещения и точность позиционирования достигается синусоидальной модуляцией токов статора и регулированием их амплитуды сервоконтроллером в зависимости от рассогласования по положению.
Делительный стол предназначен для быстрых поворотов в режиме старт - стоп. Четырехточечный радиально упорный подшипник отличается высокой жесткостью, допускает нагрузку в любом направлении и любое расположение оси вращения (вертикальное, горизонтальное, под углом, вверх ногами). Вращение стола с максимальной частотой 1400 об/мин
Рассчитываем привод:
1.Определение необходимых величин для выбора двигателя:
1.1. Определение вращающего момента.
Вращающий момент М будет равен:
М=∑m∙g∙r,где
∑m - сумма масс двигателя, направляющих, зеркала и болтов, кг
∑m=mд+mн+mз+mб=3,3кг+(2∙0,1кг)+0,3кг+(2∙0,1кг) =4кг,
где, mд- масса двигателя;
mн- масса направляющих;
mз- масса зеркала;
mб- масса болтов.
g=9,81 м/с2 - ускорение свободного падения,
r - плечо момента, r=20 мм=0,2 м.
Отсюда получаем, что вращающий момент равен
М=4кг∙9,81м/с2∙0,2м=7,8 Н∙м.
1.2.Определение частоты вращения и угловой скорости.
Угловая скорость определится, как
 ,
,
где n – требуемая частота вращения, об/мин.
 ,
,
где  – линейная скорость обработки; = 0,05 м/с.
– линейная скорость обработки; = 0,05 м/с.
 – длина обрабатываемой зоны детали.
– длина обрабатываемой зоны детали.
В нашем случае она будет определяться, как
 ,
,
где  – диаметр обрабатываемой детали, =0,4 м.
– диаметр обрабатываемой детали, =0,4 м.

Но регулируемая частота должна быть больше:
 об/мин;
об/мин;
Отсюда
 рад/с.
рад/с.
1.3.Определение времени разгона и ускорения нагрузки.
Ускорение нагрузки находится по формуле
 , где
, где
 – угловое ускорение,
– угловое ускорение,
 – время разгона двигателя.
– время разгона двигателя.
Время разгона tразг определяется, как
 , где
, где
- линейная скорость обработки; = 0,05 м/с.
а - заданное ускорение; а =0,5 м/с2.
Тогда
 с.
с.
Получаем
 рад/с2.
рад/с2.
1.4.Определение момента инерции нагрузки.
Вычислим момент инерции нагрузки по формуле
 , где
, где
М – вращающий момент; М=33 Н∙м,
tразг – время разгона двигателя,
ω – угловое ускорение.
Значит
 кг∙м2.
кг∙м2.
1.5.Определение мощности двигателя.
Мощность двигателя определяется как
Р=Рдин+Рст, где
Рдин - динамическая мощность,
Рст - статическая мощность.
Динамическая мощность находится по формуле
 кВт.
кВт.
Статическая мощность находится по формуле
 ,где
,где
∑m - сумма масс двигателя, направляющих, зеркала и болтов; ∑m=4кг,
g=9,81 м/с2 - ускорение свободного падения,
m =0,1 - коэффициент трения качения,
r - плечо момента, r=0,2м,
n - требуемая частота вращения, 2,4 об/мин.
Получаем,
 кВт.
кВт.
Значит, что мощность двигателя должна превышать
Р=0,083+0,00019=0,083 кВт.
2. Выбор двигателя.
2.1. Расчет дополнительных характеристик двигателя.
Внешний момент инерции JВ вычислим по формуле:
 , где
, где
J- момент инерции нагрузки;
n- частота вращения нагрузки;
nМ- максимальная частота вращения.
Рассчитаем статический вращающий момент:

Динамический момент находится по формуле:
 , где
, где
Jд - момент инерции двигателя, Jд=0,002 кг∙м2;
JВ - внешний момент инерции;
nМ- максимальная частота вращения;
tразг - время разгона двигателя;
Мст - статический вращающий момент.
Получаем, что динамический момент равен:

Номинальный вращающий момент МN, определяется как:
И равен:
При этом обеспечивается надежный разгон.
3. Проверка точности остановки.
Двигатель останавливается механическим тормозом, а время торможения вычисляется по формуле:
 , где
, где
Jд - момент инерции двигателя, Jд=0,002 кг∙м2;
JВ - внешний момент инерции;
nМ- максимальная частота вращения;
Мп - пусковой вращающий момент, Мп=13,6 Н м
Мст - статический вращающий момент.
Отсюда

При этом замедление при торможении равно:
График разгона и торможения представлен на рис. 4.2.
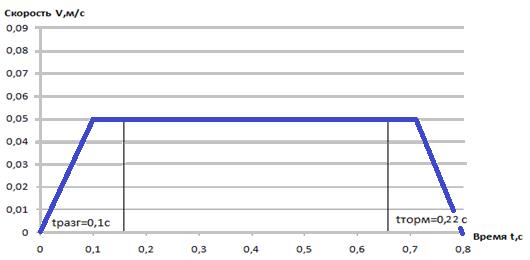
Рис. 4.2. График разгона и торможения двигателя поворотного привода.
Длина тормозного пути находится как:
 ,
,
где V- линейная скорость обработки;
tторм- время торможения;
tх- время торможения обеспечиваемое двигателем на холостом ходу, tх=0,003с.
Значит

А точность остановки равна:









