2015-06-05
2015-06-05 413
4134.1. Рис. 4.1 отражает цикличный (повторно-кратковременный) режим работы электрифицированного агрегата, для которого предусматривается выбор двигателя из серии длительного режима с принудительным обдувом (варианты задания по таблице Приложения А рассчитаны исходя из этого условия).
Поскольку на тепловой режим двигателя существенным образом могут влиять переходные режимы пуска  и торможения
и торможения  то выбор двигателя должен производиться с учетом этих режимов. Однако построение нагрузочной диаграммы двигателя включающей участки пуска и торможения, возможно лишь в том случае, если известен момент инерции ротора выбираемого двигателя. Следовательно, задача выбора мощности двигателя должна решаться в 3 этапа:
то выбор двигателя должен производиться с учетом этих режимов. Однако построение нагрузочной диаграммы двигателя включающей участки пуска и торможения, возможно лишь в том случае, если известен момент инерции ротора выбираемого двигателя. Следовательно, задача выбора мощности двигателя должна решаться в 3 этапа:
- ориентировочный расчет мощности (на основе нагрузочной диаграммы механизма) и предварительный выбор двигателя по справочным данным;
- приближенная проверка мощности двигателя с учетом переходных режимов;
- уточненная проверка мощности двигателя с учетом переходных режимов.
Предварительно номинальная мощность двигателя выбирается по условию:
 (4.1)
(4.1)
где:  - эквивалентный длительно действующий момент
- эквивалентный длительно действующий момент
 - скорость вращения двигателя в установившемся режиме
- скорость вращения двигателя в установившемся режиме
Работы,  ;
;
 - коэффициент запаса по мощности,
- коэффициент запаса по мощности,  .
.
Далее из таблицы Приложения Б выписываются все двигатели, имеющие мощности  , ближайшие большие к рассчитанной по формуле (4.1) скорости
, ближайшие большие к рассчитанной по формуле (4.1) скорости 
 , но имеющие различные моменты инерции.
, но имеющие различные моменты инерции.
Для проверки соответствия выбранных двигателей заданному режиму работы и для окончательного выбора наиболее подходящей машины необходимо построение их нагрузочных диаграмм (рис. 4.1)
Первоначально задача сводится к нахождению моментов Мп и МТ обеспечивающих разгон двигателя до скорости  за время
за время  и торможение за время
и торможение за время  :
:
 (4.2)
(4.2)
 (4.3)
(4.3)
где: Мп – средний пусковой момент двигателя, Нм
Мт – средний тормозной момент, Нм
 - суммарный момент инерции двигателя и механизма,
- суммарный момент инерции двигателя и механизма, 

Где  - момент инерции двигателя,
- момент инерции двигателя,
Из группы упомянутых выше машин принимается двигатель, удовлетворяющий условию:
 (0,55 ÷ 0,65)Мк (4.4)
(0,55 ÷ 0,65)Мк (4.4)
где: Мк – критический (максимальный) момент двигателя.
Последний определяется исходя из перегрузочной способности машины:
 (4.5)
(4.5)
где:  - перегрузочная способность,
- перегрузочная способность,  ;
;
Мн – номинальный момент,  Нм;
Нм;
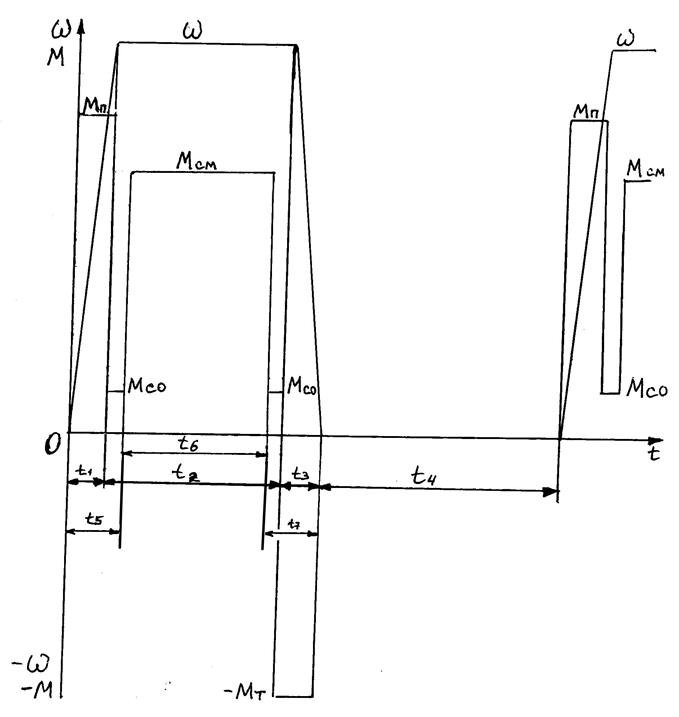
Рис. 4.1. - Нагрузочная диаграмма двигателя.
Вопрос о необходимой мощности двигателя выясняется здесь путем сравнения его номинального момента с эквивалентным, рассчитываемым по формуле:
 (4.6)
(4.6)
Если соблюдается условие  то задачу приближенной проверки мощности двигателя можно считать решенной. Если указанное условие не соблюдается, то следует повторить все ранее проделанные расчеты, предварительно приняв более высокое значение
то задачу приближенной проверки мощности двигателя можно считать решенной. Если указанное условие не соблюдается, то следует повторить все ранее проделанные расчеты, предварительно приняв более высокое значение  .
.
Окончательная проверка мощности двигателя производится на основе действительных зависимостей момента от времени при пуске и торможении (cм.п.4.6).
4.2. (см.п.3.1,2). Расчет естественной механической характеристики выбранного двигателя производится по упрощенной формуле Клосса:
 (4.7)
(4.7)
где: М, s – текущее значение момента и скольжения машины;
 - критические значения указанных величин.
- критические значения указанных величин.
Критическое скольжение определяется как:
 (4.8)
(4.8)
где:  - номинальное скольжение двигателя,
- номинальное скольжение двигателя,
 ;
;
Синхронная скорость  выбирается из ряда величин - 1500, 1000, 750, 600 об/мин - как ближайшая большая к номинальной скорости
выбирается из ряда величин - 1500, 1000, 750, 600 об/мин - как ближайшая большая к номинальной скорости  .
.
Построение характеристики рекомендуется вести в пределах (в системе координат М -  ;
;  ).
).
4.3. (см.п.3.3) Построение ступенчатой диаграммы пуска двигателя (рис.4.2) рекомендуется вести в такой последовательности:
Определяется начальный пусковой момент из соотношения:
 (4.9)
(4.9)
где:  – начальный пусковой момент
– начальный пусковой момент
 - номинальные значения момента и скольжения
- номинальные значения момента и скольжения
 – средний пусковой момент рассчитанный по формуле (4.2)
– средний пусковой момент рассчитанный по формуле (4.2)
 - число секций роторного резистора (2,3,4,5,6)
- число секций роторного резистора (2,3,4,5,6)
Принимается такое значение  , чтобы удовлетворялось условие:
, чтобы удовлетворялось условие:
 (4.10)
(4.10)
Затем определяется момент переключения:
 (4.11)
(4.11)
Найденные значения моментов откладываются на оси абсцисс. Далее проводятся прямые линии 1,2,3 и т.д., как показано на рисунке (здесь характеристика 5 – естественная, =4).
Описанная методика позволяет с первой попытки произвести точное построение диаграммы пуска.
Для построения характеристики торможения противовключением (на рисунке) рекомендуется следующий приём:
На оси абсцисс откладывается -Мт (рассчитанный по формуле), а на оси ординат  . Точка В будет находится на пересечении линий, проведенных через полученные отметки. Искомая характеристика представляет собой прямую проходящую через и пересекающую ось ординат при скорости
. Точка В будет находится на пересечении линий, проведенных через полученные отметки. Искомая характеристика представляет собой прямую проходящую через и пересекающую ось ординат при скорости  . Точка А соответствует началу торможения, т. С - его окончанию.
. Точка А соответствует началу торможения, т. С - его окончанию.
Нетрудно доказать что средний тормозной момент:
 (4.12)
(4.12)
где:  - моменты, соответствующие началу и окончанию режима торможения.
- моменты, соответствующие началу и окончанию режима торможения.
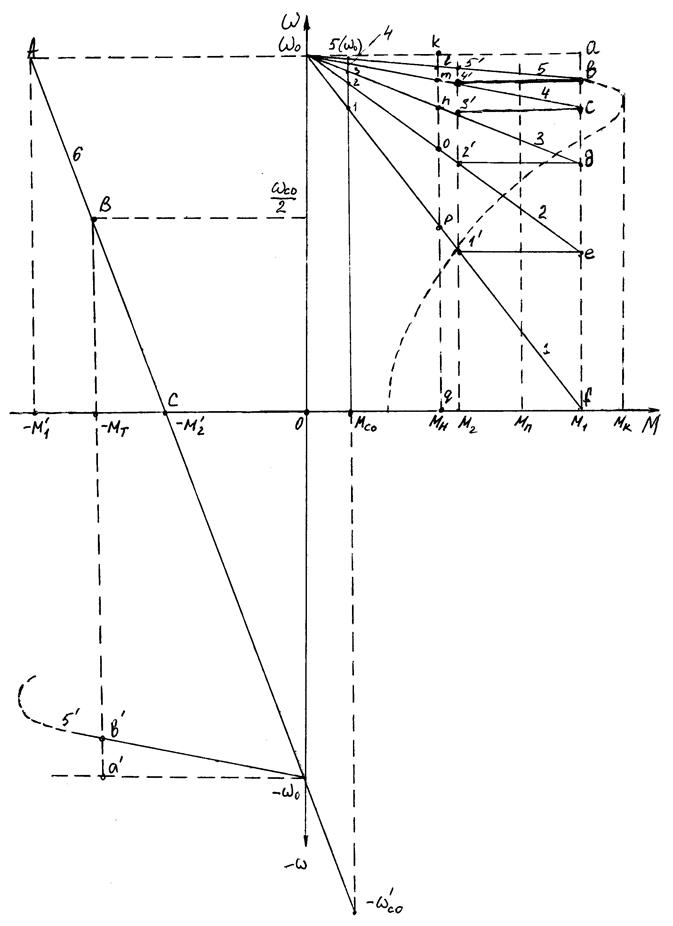
Рис. 4.2. - Диаграмма пуска и торможения двигателя.
4.4. (см. п. 3.4) При графическом метода расчет сопротивления пусковых секции роторного резистора определяются из соотношений:


 (4.13)
(4.13)
где: ef; ed; cd – отрезки на диаграмме по рис 4.2
 - масштабный коэффициент равный отношению
- масштабный коэффициент равный отношению  .
.
Сопротивление обмоток ротора связано с его параметрами следующим образом:
 (4.14)
(4.14)
где:  - паспортные данные ротора.
- паспортные данные ротора.
Sн – номинальное скольжение двигателя
Аналогичным образом находится сопротивление секции противовключения:
 (4.15)
(4.15)
где:  - отрезок на диаграмме по рис. 4.2
- отрезок на диаграмме по рис. 4.2
- масштабный коэффициент, 
 - максимальное сопротивление роторной цепи при пуске
- максимальное сопротивление роторной цепи при пуске

При аналитическом методе сопротивление i-й секции рассчитывается по формуле:
 (4.16)
(4.16)
где: - сопротивление роторной цепи, соответствующее характеристике 1, 
 - моменты найденные по формулам (4.9) и (4.11)
- моменты найденные по формулам (4.9) и (4.11)
i = 1,2,3…….. 
Сопротивление секции противовключения:
 (4.17)
(4.17)
Для выбора роторных сопротивлений используем серийные резисторы ящиков сопротивлений.
Для этого рассчитывают эквивалентные токи при пуске и при торможении электродвигателя.
Расчет эквивалентного тока при пуске электропривода:
где  и
и  - токи переключения, соответствующие пусковым моментам переключения
- токи переключения, соответствующие пусковым моментам переключения  и
и  .
.
Токи и моменты двигателя связаны соотношением  , откуда, зная номинальный момент и номинальный ток двигателя, определяем коэффициент
, откуда, зная номинальный момент и номинальный ток двигателя, определяем коэффициент  тогда,
тогда,
 и
и 
Эквивалентный тормозной ток рассчитывается аналогично эквивалентному пусковому току (вместо значений пусковых моментов в формулу подставляем значения тормозных моментов).
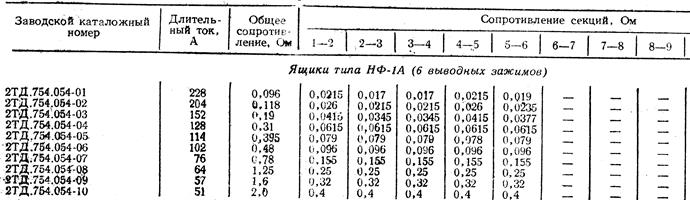
По рассчитанным значениям эквивалентных токов и ранее найденным сопротивлениям секций подбирают ящики резисторов (таблица 4.1); при этом учитывают следующее:
а) при последовательном соединении звеньев секции значение допустимого тока секции определяется звеном с наименьшим значением допускаемого тока;
б) при параллельном соединении звеньев величина допустимого тока ограничивается тем звеном, у которого произведение его допустимого тока на сопротивление имеет наименьшую величину;
в) при смешанном соединении звеньев параллельно соединенные звенья заменяются эквивалентными;
г) выводные зажимы нормализованных ящиков резисторов не маркированы; если необходимо в пределах одного ящика произвести электрическое разделение секций, то достаточно снять соответствующую перемычку между этими секциями.
Таблица 4.1. – Нормализованные ящики резисторов
Пример графического оформления соединений секций выбранных ящиков резисторов:
4.5 (см. п. 3.5). Изменения во времени скорости, момента и тока двигателя в режимах пуска, торможения, реверса и т.п могут быть описаны обобщенной формулой вида:
 (4.18)
(4.18)
где:  - соответственно текущее, конечное и начальное значения обобщенного параметра (скорости, момента или тока) двигателя;
- соответственно текущее, конечное и начальное значения обобщенного параметра (скорости, момента или тока) двигателя;
 - основание натурального логарифма;
- основание натурального логарифма;
t – время;
Тм – электромеханическая постоянная времени.
Например требуется описать переходный процесс пуска двигателя под нагрузкой (Мс=Мсо=const) с начальной скорости  . Искомое уравнение для скорости
. Искомое уравнение для скорости  получается путем подстановки в уравнение (4.18) вместо П интересующего нас параметра:
получается путем подстановки в уравнение (4.18) вместо П интересующего нас параметра:
 (4.19)
(4.19)
где:  - конечное (установившееся) значение скорости, определяемое статическим режимом работы двигателя на заданной механической характеристике.
- конечное (установившееся) значение скорости, определяемое статическим режимом работы двигателя на заданной механической характеристике.
Величины для каждой пусковой характеристики определяются положением точек 1,2,…..,5 на рис 4.2; соответственно участкам пуска находятся также величины  и Тм.
и Тм.
Разгон двигателя на участке f – 1’ (см. рис. 4.2) описывается уравнением
 (4.20)
(4.20)
на участке е – 2’ – уравнением:
 (4.21)
(4.21)
и т.д
Здесь  ..., - значения скорости в точках 1,2…. 5
..., - значения скорости в точках 1,2…. 5
 - начальные значения скорости, определяемые положением точек 1’(e), 2’(d) и т.д
- начальные значения скорости, определяемые положением точек 1’(e), 2’(d) и т.д
Тм2 – электромеханические постоянные времени на характеристиках 1,2…5
Последние удобно рассчитывать по формулам:
 (4.22)
(4.22)
 (4.23)
(4.23)
где: Sp; So – скольжения двигателя при номинальном моменте на характеристиках 1,2….5; в точках p,o рассчитываемые по отношениям: Sp = kp/kq; So = ko/kq
Уравнение переходного процесса для момента согласно формуле (4.18) имеет вид:
 (4.24)
(4.24)
где:  (см. рис. 4.2), Тм = Тм1, Тм2 и т.д соответственно характеристикам пусковой диаграммы.
(см. рис. 4.2), Тм = Тм1, Тм2 и т.д соответственно характеристикам пусковой диаграммы.
Времена разгона на участках f – 1’, е – 2’, … с – 4’ рассчитывается по формулам:
 (4.25)
(4.25)
 (4.26)
(4.26)
 (4.27)
(4.27)
Время разгона двигателя на естественной механической характеристике (участок b – 5’ на рис. 4.2)
 (4.28)
(4.28)
На рис 4.3 представлены зависимости скорости и момента от времени, соответствующие пусковой диаграмме по рис. 4.2.
Рис. 4.3. Зависимости скорости и момента от времени в период пуска двигателя.
 Рис. 4.4. Зависимости скорости и момента от времени в период торможения двигателя.
Рис. 4.4. Зависимости скорости и момента от времени в период торможения двигателя.
Для получения зависимостей  и М(t) при торможении противовключением в уравнение (4.18) следует подставить
и М(t) при торможении противовключением в уравнение (4.18) следует подставить  и Мсо,
и Мсо,  и
и  .
.
Время торможения на участке А – В:
 (4.29)
(4.29)
где:  - электромеханическая постоянная времени на характеристике 6.
- электромеханическая постоянная времени на характеристике 6.
В приведенную формулу входят абсолютные значения скорости и момента (без учета их знаков).
Искомые зависимости для торможения иллюстрированы рис. 4.4
Следует отметить, что суммарное время разгона:
 (4.30)
(4.30)
и время торможения  получаются несколько завышенными (на 4-5%) против тех значений, которые заданны тахограммой по рис. 3.1. Это объясняется вогнутостью экспоненциальных кривых М(t) в силу которой фактические средние пусковой и тормозной моменты двигателя ниже ранее рассчитанных значений Мп и Мт.
получаются несколько завышенными (на 4-5%) против тех значений, которые заданны тахограммой по рис. 3.1. Это объясняется вогнутостью экспоненциальных кривых М(t) в силу которой фактические средние пусковой и тормозной моменты двигателя ниже ранее рассчитанных значений Мп и Мт.
Данное обстоятельство должно учитываться при оценке степени соответствия результатов расчета исходным величинам t1 и t3, однако оно заметным образом не влияет на программу работы механизма и тепловой режим работы двигателя.
Зависимости тока двигателя от времени определяются соотношением:
i (t) = cM (t) (4.31)
где: с – коэффициент пропорциональности, равный 
4.6. (см. п. 3.6). Уточненная нагрузочная диаграмма двигателя отличается от диаграммы на рис. 4.1 тем, что в периоды пуска и торможения момент двигателя изменяется согласно кривым на рис. 4.3 и 4.4 а времена пуска и торможения соответственно равны  и
и  .
.
Эквивалентный длительнодействующий момент:
 (4.32)
(4.32)
где:  (4.33)
(4.33)
 (4.34)
(4.34)
 - время цикла работы механизма,
- время цикла работы механизма,  (см. рис. 3.1)
(см. рис. 3.1)
Двигатель будет находиться в нормальном тепловом режиме, если:
 (4.35)
(4.35)
4.7. (см. п. 3.7) Основой для реализации заданных принципов автоматизации пуска и торможения двигателя может служить схема, приведенная на рис. 4.5
4.8. Как известно, ЭДС ротора  , в зависимости от скольжения или скорости вращения изменяется по линейному закону:
, в зависимости от скольжения или скорости вращения изменяется по линейному закону:
 (4.36)
(4.36)
где:  - номинальное напряжение (ЭДС) ротора (при S=1).
- номинальное напряжение (ЭДС) ротора (при S=1).
Приблизительно по такому закону будет изменяться в зависимости от скорости вращения и напряжение на катушке KV (см. рис. 4.5). Уставка напряжения втягивания KV  принимается равной (1,2-1,6)
принимается равной (1,2-1,6)  .
.
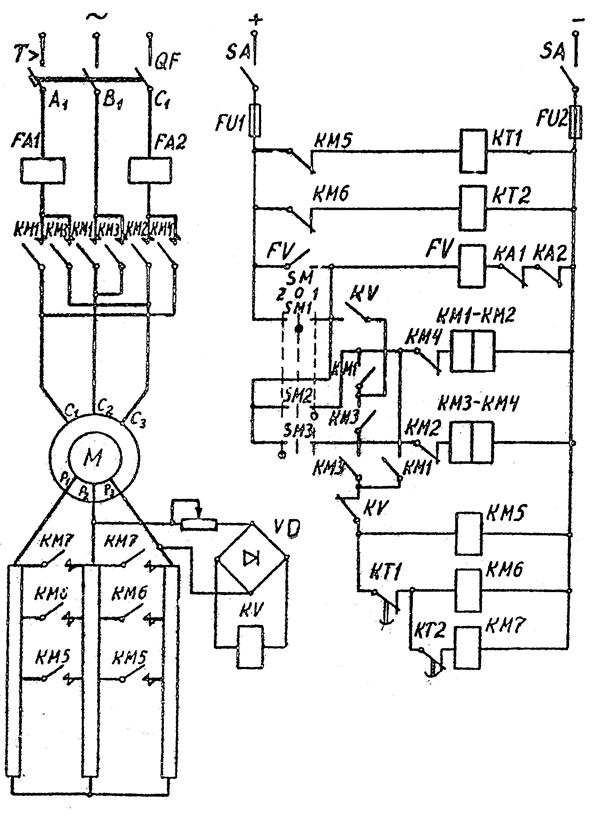
Рис.4.5. – Схема автоматизации пуска и торможения двигателя.