 2015-06-28
2015-06-28 9834
9834Значительно улучшить точность регулирования можно применением ПИД-закона (Пропорционально-Интегрально-Дифференциальный закон регулирования).
Для реализации ПИД-закона используются три основные переменные:
 P – зона пропорциональности, %;
P – зона пропорциональности, %;
I – время интегрирования, с;
D – время дифференцирования, с.
Ручная настройка ПИД-регулятора (определение значений параметров Р, I, D), обеспечивающая требуемое качество регулирования, достаточно сложна и на практике редко используется. ПИД-регуляторы серии UT/UP обеспечивают автоматическую настройку ПИД-параметров под конкретный процесс регулирования, сохраняя при этом возможность их ручной корректировки.
Пропорциональная составляющая
В зоне пропорциональности, определяемой коэффициентом Р, сигнал управления будет изменяться пропорционально разнице между уставкой и действительным значением параметра (рассогласованию):
сигнал управления = 100/P • E,
где E – рассогласование.
Коэффициент пропорциональности (усиления) К является величиной обратнопропорциональной Р:
К = 100/Р.
Зона пропорциональности определяется относительно заданной уставки регулирования, и внутри этой зоны сигнал регулирования изменяется от 0 до 100%, т. е. при равенстве действительного значения и уставки выходной сигнал будет иметь значение 50%.
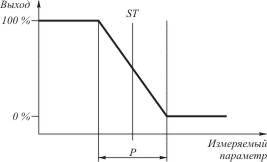
где Р – зона пропорциональности;
ST – уставка регулирования.
Например:
диапазон измерения 0…1000 °С;
уставка регулирования ST = 500 °С;
зона пропорциональности P = 5%, что составляет 50 °С (5% от 1000 °С);
при значении температуры 475 °С и ниже управляющий сигнал будет иметь величину 100%; при 525 °С и выше – 0%. В диапазоне 475…525 °С (в зоне пропорциональности) управляющий сигнал будет изменяться пропорционально величине рассогласования с коэффициентом усиления К = 100/Р = 20.
Уменьшение значения зоны пропорциональности Р увеличивает реакцию регулятора на рассогласование, т. е. малому рассогласованию будет соответствовать большее значение управляющего сигнала. Но при этом, из-за большого усиления, процесс принимает колебательный характер около значения уставки, и точного регулирования добиться не удастся. При излишнем увеличении зоны пропорциональности регулятор будет слишком медленно реагировать на образующееся рассогласование и не сможет успевать отслеживать динамику процесса. Для того, чтобы компенсировать эти недостатки пропорционального регулирования, вводится дополнительная временная характеристика – интегральная составляющая.
Интегральная составляющая
Определяется постоянной времени интегрирования I, является функцией времени и обеспечивает изменение коэффициента усиления (сдвиг зоны пропорциональности) на заданном промежутке времени.
сигнал управления = 100/P • E + 1/I • ∫ E dt.
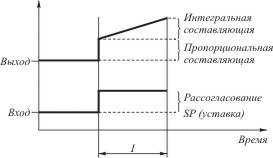
Как видно из рисунка, если пропорциональная составляющая закона регулирования не обеспечивает уменьшение рассогласования, то интегральная составляющая начинает на периоде времени I плавно увеличивать коэффициент усиления. Через период времени I процесс этот повторяется. Если же рассогласование мало (или быстро уменьшается), то коэффициент усиления не увеличивается и, в случае равенства значения параметра заданной уставке, принимает какое-то минимальное значение. В этом плане об интегральной составляющей говорят как о функции автоматического выключения регулирования. В случае регулирования по ПИД-закону переходная характеристика процесса будет представлять собой колебания, постепенно затухающие к значению уставки.
Дифференциальная составляющая
Многие объекты регулирования достаточно инерционны, т. е. имеют задержку реакции на приложенное воздействие (мертвое время) и продолжают реагировать после снятия управляющего воздействия (время задержки). ПИД-регуляторы на таких обьектах будут всегда запаздывать с включением/выключением управляющего сигнала. Для устранения этого эффекта вводится дифференциальная составляющая, определяемая постоянной времени дифференцирования D, и обеспечивается полная реализация ПИД-закона управления. Дифференциальная составляющая есть производная во времени от рассогласования, т. е. является функцией скорости изменения параметра регулирования. В случае, когда рассогласование становится постоянной величиной, дифференциальная составляющая перестает оказывать воздействие на сигнал управления.
сигнал управ. = 100/P • E + 1/I • ∫ E dt + D • d/dt • E.
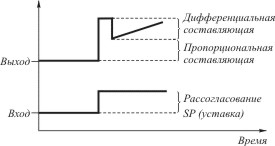
С введением дифференциальной составляющей регулятор начинает учитывать мертвое время и время задержки, заранее изменяя сигнал управления. Это позволяет значительно уменьшить колебания процесса около значения уставки и добиться более быстрого завершения переходного процесса.
Таким образом, ПИД-регуляторы, генерируя управляющий сигнал, учитывают характеристики самого объекта управления, т.е. проводят анализ рассогласования на величину, на продолжительность и скорость изменения. Иными словами, ПИД-регулятор "предвидит" реакцию объекта регулирования на сигнал управления и начинает изменять управляющее воздействие не при достижении значения уставки, а заранее.
5. Передаточная функция какого звена представлена: К(р) = К/Тр

