2015-07-04
2015-07-04 726
726Спутниковые навигационные системы включают три элемента: космический (навигационные ИСЗ), наземный (комплекс управления спутниками) и оборудование пользователей. Технической основой СРНС и источником навигационной информации являются 24 ИСЗ, вращающиеся на высоте 20000 км с периодом обращения 12 час и равномерно «покрывающие» всю земную поверхность. Спутники GPS способны, передвигаясь заполнять бреши в системе (если один из них вышел из строя).
Принцип действия.
Сигналы спутника содержат два вида информации: «навигационные сообщения» и «псевдослучайный код». Код представляет собой последовательность единиц и нулей, на первый взгляд случайную, но изменяющуюся по сложному закону, индивидуальному для каждого спутника.
Генерация «псевдослучайного кода» привязана к шкале времени ИСЗ, точность которой обеспечена высокоточными атомными часами (рубидиевые и цезиевые, по четыре на каждом спутнике). «Навигационные сообщения» - это данные об исправности спутника и параметры его орбиты (эфемериды) - коэффициенты, которые регулярно уточняются в результате взаимодействия с наземным комплексом управления спутниками.
Приёмник GPS также содержит генератор, который может повторить «псевдослучайный код» любого из спутников. Работа генератора привязана к кварцевым часам приёмника.
Итак, на приёмник поступают сигналы со спутника. Дешифровывая эти сигналы, приёмник идентифицирует его номер и по эфемеридам вычисляет текущее и будущее положение данного спутника, используя математическую Кеплеровскую модель. В это же время в приёмнике запускается генератор кода, точно повторяющего код спутника. При сопоставлении своего кода с кодом, принимаемым от спутника, определяется суммарный временной сдвиг, состоящий из двух слагаемых: задержки времени, пропорциональной дальности до спутника и набегающей погрешности хода кварцевых часов приемника.
Приемник GPS имеет программу, которая производит вычисления основываясь на трех линиях положения (т.е. по данным, полученным от трёх спутников). Математически это решение трех уравнений для трех неизвестных: долготы, широты и ошибки часов.
В итоге, для определения двухмерных координат приёмнику необходимы как минимум три спутника, для трехмерных — четыре.
Точность.
GPS приёмник при нормальных условиях эксплуатации обеспечивает точность порядка 15 метров. Скорость индицируется с точностью не хуже 0,12 узла (примечание: минимальная скорость, при которой прибор индицирует её значение — 2 узла).
Внимание! Министерство Обороны США, в чьём подчинении находится отдел технического обслуживания спутников системы GPS, может ввести в действие режим селективного доступа к данным, при этом точность определения для обычных пользователей падает до 100 метров и более.
Следует также иметь в виду, что приведённую выше точность прибор обеспечит лишь в том случае, когда между его антенной и спутниками нет источников помех и поблизости нет источников отражённых сигналов. На яхте такими источниками обычно являются троса стоячего такелажа. Чтобы избежать помех необходимо антенну приёмника вынести на топ мачты, либо на стойку, укреплённую на релинге.
По этим же причинам не стоит размещать антенну прибора непосредственно около металлических предметов и наклеивать на неё наклейки. Если на яхте используется ручной прибор, и нет возможности вынести его антенну, то при определении места следует учитывать возможность ошибки порядка 150 метров.
Ещё одно требование: расстояние антенны GPS от антенны морского передатчика мощностью 25 Ватт должно быть не меньше 1 метра.
Координатные системы карт (Map Datum).
По историческим причинам геодезические департаменты разных стран используют различные модели земного шара. Карты, составленые по разным моделям, дают разные координаты одного и то-же места. Эта разница может достигать 500 метров.
В память приёмника GPS обычно занесено несколько координатных системах (Map Datum). По умолчанию установлена WGS84 (ещё есть WGS72, OSGB36, NAD27 и другие). Если одна из этих систем соответствует координатной системе Вашей навигационной карты, то следует её активировать.
Если координатная система Вашей карты неизвестна, то лучше пользоваться WGS84. При каждом удобном случае сравнивайте координаты надёжного ориентира, отмеченного на карте с координатами, определёнными в этой же точке приёмником GPS. Направление и величина невязки записываются в вахтенный журнал и учитываются при работе с GPS.
Первичная инициализация.
Для определения координат прибор нуждается в знании текущей даты, времени и примерного местоположения на Земном шаре с точностью до 300 км. Поэтому при первом включении, либо после длительного хранения без батарей, прибор нужно инициализировать (см. инструкцию).
Работа прибора.
После включения GPS находит своё местоположение и начинает периодически его сканировать, отслеживая изменение координат, вычисляя при этом скорость V и курс яхты ИК (или МК, см. инструкцию).
В каждом современном приёмнике GPS есть функция запоминания координат. При этом позиция записывается под выбранным пользователем именем в библиотеку путевых точек (в разных моделях GPS обозначаемых как «WPT» или «LMK»). Записать можно как текущие координаты, так и любые введённые по данным с навигационной карты. Если после этого инициировать функцию достижения предварительно введённой путевой точки, то прибор начнёт непрерывно индицировать дополнительные данные относительно неё, а именно:
• истинный или магнитный пеленг на путевую точку ИП (МП);
• оставшееся до точки расстояние D;
• расчётное время достижения точки (при условии неизменности скорости) TTG.
Ещё больше информации выдаст прибор при активации маршрута. Каждый приёмник GPS имеет память на как минимум один маршрут, который штурман заранее вводит в память, путём указания запрограммированных путевых точек в последовательности соответствующей предварительной прокладке предполагаемого пути. При активации выполнения маршрута прибор, сравнивая текущее место яхты с заданной линией пути по предварительной прокладке, кроме всего вышеперечисленного выдаёт также текущее расстояние яхты от заданной линии пути XTE и направление и величину коррекции курса для выхода на эту линию пути.
Задачи, решаемые при помощи GPS.
Коррекция курса яхты.
Во время следования по линии генерального курса в точку назначения, периодически определяют местоположение при помощи GPS и наносят на карту. Если полученная таким образом линия пути отличается от линии истинного курса на какой-то угол, то этот угол вычитают из компасного курса. Продолжают путь по откорректированному значению КК, продолжая периодически контролировать местоположение:
Контроль счисления пути.
Штурман яхты, проложив на карте линию пути с учетом склонения, дрейфа и течения, имеет возможность в любое время снять координаты с дисплея GPS и нанести их на карту. Если полученная точка совпадает со счислимой, или расходится с ней незначительно, — счисление пути судна ведется правильно. Если нет — в счисление вносят поправку (аналогично предыдущему пункту).
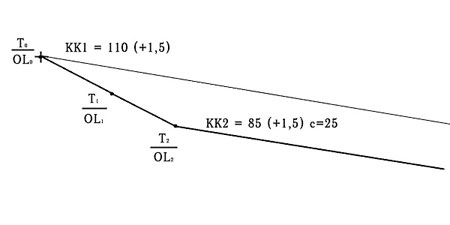
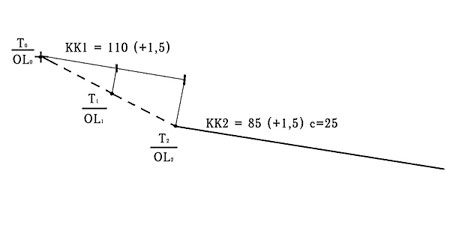
Пример. В момент Т0 начато счисление пути яхты для следования путевым углом ПУ=108,5° при склонении 1,5°Е на курсе КК=110° без учета сноса (см. рис). В ходе плавания счисление контролировалось по GPS, координаты точек, снятые с дисплея в Т1, Т2, Т3 нанесены на карту. Последнюю обсервацию приняли для дальнейшего счисления. Выявлено, что фактический путевой угол яхты на 25° больше расчетного, для сохранения заданного путевого угла изменили курс на 25° влево. Продолжили счисление с учетом суммарного сноса, продолжая периодический контроль.
Контроль перехода в заданную точку по GPS.
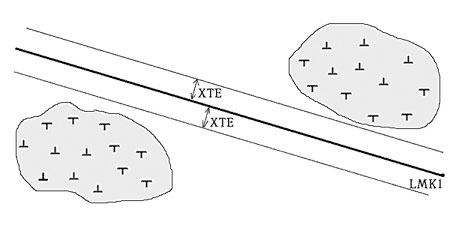
С карты снимают координаты точки назначения и заносят в память GPS (LMK1). На карте выбирают также «коридор безопасности» — величина допустимого отклонения яхты в обе стороны от оси движения без риска входа в зону опасности (с учётом погрешности от разности в Map Datum!). Прибор индицирует такое отклонение как параметр XTE:
В начале перехода активируется функция (обычно функция «GO TO») достижении точки LMK1. Яхту ведут по компасу, регулярно контролируя величину XTE. Если она имеет постоянную тенденцию к увеличению, то в КК вносят компенсирующую поправку.
Предварительная прокладка.
Возможность программирования маршрута предстоящего перехода путём введения в память прибора путевых точек (LMK) и очерёдности их достижения очень упрощает работу штурмана на маршруте и снижает риск возможных ошибок при счислении и прокладке пути в дискомфортных условиях и в состоянии усталости, которые столь характерны при длительном бурном переходе на яхте.
На карту наносят точки выхода и прихода. Отмечают все имеющиеся по пути следования опасности («поднимают карту»).
Затем выбирается «коридор безопасности» маршрута (предельный XTE). При этом руководствуются такими данными:
- наличие узких проходов между опасностями;
- «степень доверия» к карте (год выпуска с учётом коррекций, масштаб) и величину возможной невязки по разности Map Datum;
- вероятность лавировки.
Возможно, на разных галсах маршрута имеет смысл назначить разную величину XTE.
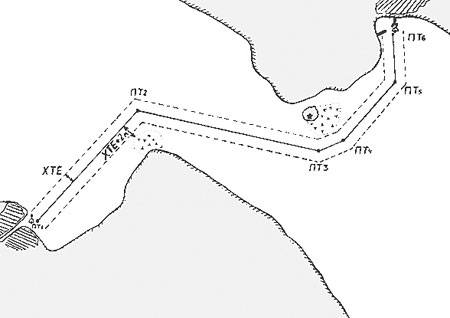
После этого на карту наносят промежуточные точки маршрута (точки поворота) с учётом выбранного XTE и дополнительного запаса (расстояние от опасности до ближайшей границы «коридора безопасности»). Определяют КК для каждого галса.
Далее все точки маршрута заносят в память GPS-приёмника.
Движение по маршруту.
В начале перехода активируется выполнение маршрута. На каждом галсе маршрута правят по компасу (КК для данного галса), регулярно контролируя величину XTE. Если она имеет постоянную тенденцию к увеличению, то в КК вносят компенсирующую поправку.
В точках поворота прибор сам переключится на отслеживание очередного галса маршрута.
На лавировке рулевой ведёт яхту по вымпельному ветру, контролируя изменение величины XTE. При достижении выбранного предельного значения делают поворот оверштаг и вновь идут отслеживая XTE.
Таким образом, на переходе штурман может быть уверен, что если яхта отклоняется от оси маршрута не более чем на величину XTE, то она гарантировано находится вне опасности.
Раскладка галсов на лавировке.
Если яхте предстоит лавировка в открытом море при периодически изменяющемся по направлению ветре, то активируют функцию достижения заданной путевой точки и закладывают галсы исходя из разницы истинного курса и истинного пеленга на точку прихода. Яхту ведут круто к ветру по передней шкаторине стакселя. Если при этом на галсе индицируемая на приёмнике GPS разница ИП — ИК < 45°, то этот галс выгоден, если же нет, то выгоднее его сменить.
Ещё проще использовать в такой ситуации значение функции VMG (абсолютная скорость продвижения по генеральному курсу), идя тем галсом, на котором этот показатель больше (данная функция реализована не во всех моделях GPS).
www.ukryachting.net