 2015-07-04
2015-07-04 1388
1388Електровізки (електрокари) використовуються для транспортировки различных грузов на площадках з твердим і рівним покриттям (асфальт, бетон). Електровізки можуть працювати у вузьких проходах виробничих і складських приміщень, де робота інших видів транспорту неможлива.
Добра маневреність, зручне керування, простота обслуговування, відсутність при роботі шкід -ливих для людині газів, безшумність роблять електрвізок незамінним універсальним засобом перевезення вантажів на невеликі відстані.
Широке розповсюдження отримали однодвигуневі акумуляторні візки типу ЭТ-2040 (рис.1). Електровізок має двохосне шасі на пневматичних шинах з переднім керованим і заднім ведучим мостами. На шасі кріпиться рама; її верхня частина являє собою дерев’яну вантажну платформу, під якою розташована акумуляторна батарея. Рух ведучим колесам передається від двигуна постійного струму послідовного збудження карданним валом і диференціалом. Електровізок обладнаний двома системами гальм: ножним гальмом з гідравлічним приводом, який діє на задні колеса, і ручным гальмом з механічним приводом, встановленим на валу двигуна.
Основні технічні дані електровізка ЭТ-2040: вантажність 2000 кг, маса візка - 1860 кг, швидкість руху з вантажем 16 км/год., без вантажу 22 км/год., двигун типу РТ-2 (Рном = 3,2 кВт, Uном = 40 В, Іном = 100 А, ωном =100 рад/с, ТВном = 40%), закритий з природним охолодженням.
Принципова електрична схема візка типу ЭТ-2040 показана на рис.2, а. Електричні кола отримують живлення від акумуляторної батареї 36ТЖН-400, яка складається з двох секцій Б1 і Б2. Для комутації силових кіл використовуються контактори К1—К7 і кремнієві вентілі Д1,Д2 (типа В2-200-3Б).
Двигун Д управляється поворотним контролером, який складається з кулачкового валу і мікропере- микачів Kpl—Кр6. Обертання вала контролера здійснюється на 60° від педалі водія, при цьому в кожному положенні відбувається переключення контактів у відповідності з діаграмою на рис. 2, б.
Регулювання швидкості візка виконується зміною напруги на якорі двигуна Д шляхом переклю- чення диодами Д1, Д2 і контактором К1 секцій акумуляторної батареї Б1 і Б2 з параллельного з’єднання на последовне, введеням резистора R1 в коло якоря і шунтуванням обмотки збудження ОВМ резистором R2.
Для підготовки візка до роботи слід включити вимикач В1, поставити реверсивный перемикач ВЗ в одне з положень «Вперед» або «Назад» і вимкнути ручне гальмо (замкнеться контакт вимикача В2).
Послідовність коммутації апаратів схеми при пуску і регулюванні швидкості двигуна Д у відповід- ності з позиціями контролера наступна:
- В положенні 1 контролера через замкнувшийся контакт Kpl і контакт «Вперед» (або «Назад»)
перемикача ВЗ отримує живлення контактор К4 (або К6) і своїм головнимм контактом готує до включення коло якоря двигуна.
2. В положении 2 контролера переключається контакт Кр2 і включається контактор К7 (К5), замикаючи силове коло двигуна Д. Секції батареї Б1 і Б2 через діоди Д1 і Д2 з’єднуються паралельно, резистор R1 введений. Двигун пускаеться і працює на характеристиці 1 зі швидкістю ω1 (рис. 2, б), якщо струм навантаження Іс = Іном. Котушки реверсивних контакторів К7 (К5) і К4 (К6) отримують живлення через допоміжні контакти К6 (К4) і К6 (К7), чім забезпечуєьбся блокування положення 2 контролера.
3. В положенні 3 контролера через контакти Кр3 і Кр4 отримує живлення контактор К2 і своїм контактом виводить резистор R1; секції батареї лишаються з’єднаними паралельно, двигун працює на характеристиці 2 зі швидкістю ω2.
4. В положенні 4 контролера переключається контакт Кр4 і включається контактор К1, а контактор К2 відключається. Секції батареї Б1 і Б2 силовим контактом К1 з’єднуються послідовно, до якірного кола підводиться номінальна напруга Uном при включеному резисторі R1, і двигун Д працює на характеристиці 3 зі швидкістю ω3.
5. В положенні 5 контролера знов включається контактор К2, резистор R1 закорочується, двигун працює на природній характеристиці 4 зі швидкістю ω4 = ωном.
6. В положеннях 6—7 контролера через контакт Кр6 включається контактор КЗ, паралельно ОВМ підключається резистор R2, ослаблюється потік збудження, і двигун буде розвивати швидкість ω5 > ωном. працюючи на характеристиці 5.
Гальмування здійснюється механічним гальмом при натисканні на гальмівну педаль, при цьому необхідно попередньо відпустити педаль контролера. Під дією гальмівної педалі розмикається контакт В2, втрачає живлення контактор К4 (або К6), і двигун відключається від джерела живлення.
Повна електрична схема електровізка включає в себе кола освітлення і сигнализації, які не показані на рис.2, а. Захист силового кола від струмів к. з. та тривалих перевантажень виконується запобіжниками Пр1 в колі акумуляторної батареї (при пробої вентилів Д1 або Д2) і Пр2 — в колі двигуна Д. кола управління захищаються запобіжником ПрЗ.
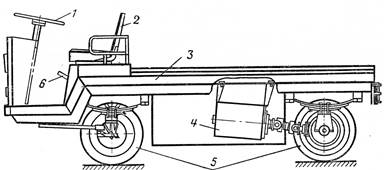
Рис.1. Загальний вигляд електровізка.
1 — рульове управління;
2 — сидіння водія;
3 — корпус візка;
4 — двигун;
5 — ходові колеса;
6 — рукоятка гальма.
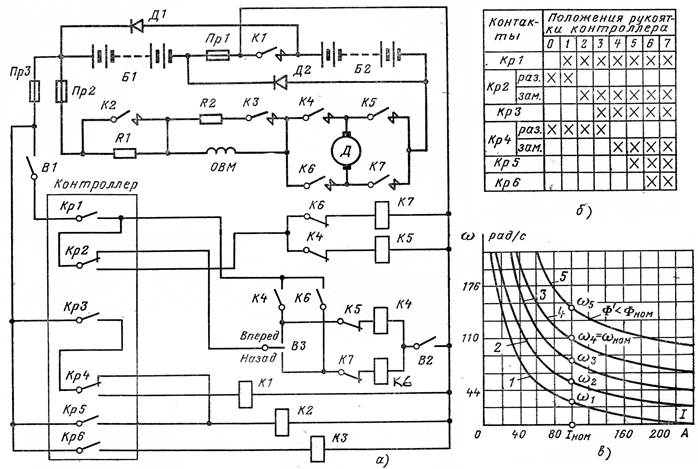
Рис.2. Принципова електрична схема візка типу ЭТ-2040.








