 2015-07-04
2015-07-04 1243
1243Для САР температуры в камере инкубатора рис. 1.1 в качестве математической модели принята нелинейная модель в виде структурной схемы (см. рис. 1.5) при следующих значениях параметров элементов
САР: Тк = 1800 с; kм = 0,6; k0 = 0,4; Тн = 300 с; kн = 0,1 °С/Вт; Тт = 0; kт, = 9 • 10-5 В/°С; kтр = 50; R = 32 Ом; kу = 10... 100.
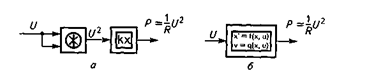
Рис. 3.6.1. Структурные схемы моделирования нелинейной функциональной
зависимости (1.8):
а — с помощью блоков Функции математические; б — с помощью блока Новый
Входные ступенчатые воздействия на систему: задающее U0 = = 0,02318 В (при kv = 100); возмущающие Θ0 = -20 "С (при t = 0) и Θ0 = -21,5 °С (при t = 30 000 с).
Нелинейность данной САР, как отмечалось выше, обусловлена нелинейной функциональной зависимостью мощности нагревательного элемента Рн от приложенного к нему напряжения UH [см. формулу (1.8)]. Эта нелинейная функция в среде ПК «МВТУ» с привлечением блоков Функции математические и Новый реализуется с помощью структурных схем, показанных на рисунке 3.6.1.
Для моделирования САР на основе блоков Функции математические достаточно владеть методикой и процедурами работы в среде ПК «МВТУ. При моделировании нелинейных систем с использованием блока Новый, являющегося, по сути, универсальным инструментом для реализации любых аналитических зависимостей, помимо упомянутых выше методики и процедур необходимо знать особенности блока Новый. Поэтому демонстрационный пример построен на основе этого блока.
Структурная схема моделирования демонстрационной САР показана на рисунке 3.6.2.
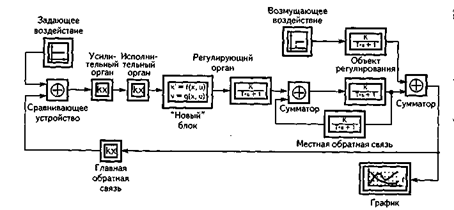
Рис. 3.6.2. Структурная схема моделирования нелинейной САР температуры в инкубаторе

Рис. 3.6.3. Схемное Окно с блоком Новый
Исходные данные, необходимые для моделирования САР, с учетом заданных значений параметров ее элементов:
максимальный шаг интегрирования 10 с;
минимальный шаг интегрирования 0,01 с;
время интегрирования 50 000 с;
число точек для выдачи данных 1000;
метод интегрирования «Адаптивный 1»;
точность интегрирования 0,05.
Этап 1 — работа с блоком Новый. После запуска ПК «МВТУ» переместите курсор на копку Новый и однократно щелкните левой клавишей «мыши» — откроется чистое Схемное Окно. Переместите курсор на «закладку» Динамические звенья, инициализируйте ее, переместите курсор на Новый блок, однократно щелкните левой клавишей «мыши» и перенесите в центр Схемного Окна Новый блок. В результате выполнения этих операций Схемное Окно примет вид, показанный на рисунке 3.6.3.
Переместите курсор на Новый блок и двукратно щелкните левой клавишей «мыши» — в Схемном Окне появится окно Редактор интерпретатора математических функций (рис. 3.6.4).
В появившемся окне запишите нелинейную функциональную зависимость мощности (1.8) в такой последовательности:
input U; (описание имени и размерности входной величины — напряжения на нагревателе U}
R = 32; {значение константы — сопротивления нагревателя R}
Р = UA2/R; (вычисление мощности Р}
output Р; (описание имени и размерности выходной величины — мощности нагревателя Р}
Комментарии необходимо заключать в фигурные скобки. При записи функциональных зависимостей давать комментарии не обязательно.
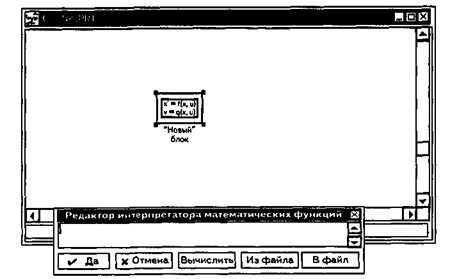
Рис. 3.6.4. Схемное Окно с Редактором интерпретатора математических функций
После выполнения операций записи функциональной зависимости (1.8) Схемное Окно с Редактором интерпретатора математических функций примет вид, показанный на рисунке 3.6.5.
Переместите курсор на кнопку ОК и однократно щелкните левой клавишей «мыши» — закроется окно Редактор интерпретатора математических функций и откроется Главное Схемное Окно, в котором Новый блок будет иметь один вход и один выход.
Этап 2 — формирование в Схемном Окне структурной схемы моделирования САР (см. рис. 3.6.2). Используя известные процедуры заполнения Схемного Окна типовыми блоками и проведения линий связи на структурных схемах (см. лабораторную работу 1), дополните Схемное Окно с блоком Новый (см. рис. 3.6.3) необходимыми блоками и соедините их согласно исходной структурной схеме САР (см. рис. 3.6.2). Для наглядности можно сделать соответствующие надписи на схеме. В результате выполнения этапа 2 Главное Схемное Окно будет иметь вид, показанный на рисунке 3.6.6.
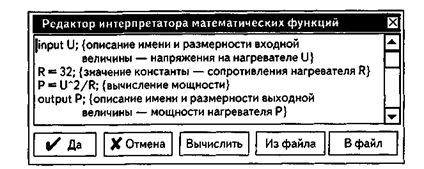
Рис. 3.6.5. Окно Редактор интерпретатора математических функций блока Новый, реализующего функцию (1.8)
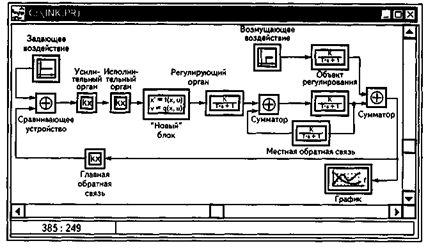
Рис. 3.6.6. Схемное Окно с введенной структурной схемой моделирования САР
Этап 3 — ввод параметров структурной схемы. Используя известные процедуры установки параметров блоков, рассмотренные в лабораторной работе 1 или 2, введите значения параметров передаточных функций элементов и входных воздействий в соответствующие блоки структурной схемы моделирования САР (см. рис. 3.6.6).
Этап 4 — моделирование переходного процесса САР. Переместите курсор на блок График и двукратно щелкните левой клавишей «мыши» — откроется графическое окно.
Переместите курсор на командную кнопку Продолжить и щелкните левой клавишей «мыши» — вы запустили задачу на счет. В графическом окне в процессе расчета будет отображаться график переходного процесса САР (рис. 3.6.7). Для наглядности можно сделать надписи на его осях.
Исходные данные для выполнения индивидуального задания. За основу при выполнении индивидуального задания взята САР загрузки рабочего органа траншейного выгрузчика силоса [6], конструкция и принцип работы которого состоят в следующем.
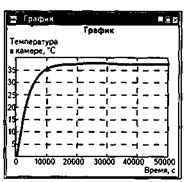
Рис. 3.6.7. Графическое окно
Рабочий орган — цепочно-планчатый отделитель (ЦПО) перемещается по вертикальной направляющей мачтового типа. При рабочем ходе (движение вниз) ЦПО фрезерует горизонтальную поверхность силосного монолита. Отделенный корм по направляющему кожуху попадает в приемное устройство наклонного транспортера и далее системой транспортеров подается в мобильное транспортное средство или в поточную линию раздачи кормов. После достижения крайнего нижнего положения ЦПО поднимается над поверхностью корма и смещается поперек траншейного хранилища по порталу на ширину рабочего органа. В такой последовательности выгрузчик выполняет операции, пока не выберет силос по всей ширине хранилища. Затем выгрузчик силоса по рельсам, уложенным на бортах траншейного хранилища, перемещается в глубь хранилища на расстояние, равное длине отделителя. После этого цикл выемки корма повторяется. Все операции по управлению выгрузчиком осуществляет оператор из специальной кабины.
Для стабилизации загрузки рабочего органа применена САР (рис. 3.6.8), принципы построения и работы которой следующие. Регулирование загрузки рабочего органа (ЦПО) 1 обеспечивается по току I асинхронного электродвигателя 2. Ток I контролируется с помощью трансформаторов тока 3 и посредством выпрямительной схемы Ларионова 4 преобразуется в напряжение постоянного тока U. Напряжение U, однозначно зависящее от тока I, сравнивается с задающим напряжением U0, которое снимается с задающего потенциометра 5. Сигнал рассогласования ΔU= U0 — Uподается на электронный усилитель (регулируемый выпрямитель) 6, с выхода которого напряжение Un поступает на электродвигатель 1 привода перемещения ЦПО, работающий при его перемещении вниз в режиме динамического торможения.
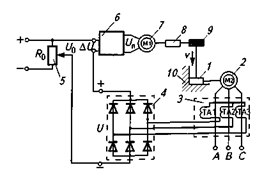
Рис. 3.6.8. Принципиальная схема САР:
1 — рабочий орган (ЦПО), 2 — электродвигатель М2 привода ЦПО; 3 — трансформаторы тока ТА1, ТА2, ТАЗ; 4 — выпрямительная схема Ларионова; 5 — задающий потенциометр R0,6— регулируемый выпрямитель;7— электродвигатель Ml привода подачи ЦПО; 8,9— соответственно редуктор и барабан привода подачи ЦПО, 10— силосный монолит.
При выемке силоса из траншеи ЦПО перемещается вниз под действием гравитационной силы, а скорость его перемещения (подачи) v регулируется по цепи обратной связи посредством изменения тормозного момента электродвигателя 7 в режиме динамического торможения. Таким образом, при изменениях плотности силоса ρ (возмущающего воздействия) по высоте хранилища обеспечивается стабилизация тока I в пределах малых отклонений от заданного номинального значения Iн.
Функциональная схема САР показана на рисунке 3.6.9, а структурная ее схема — на рисунке 3.6.10.
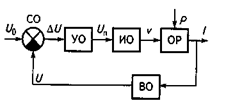
Рис. 3.6.9. Функциональная схема САР:
ОР — объект регулирования (ЦПО совместно с электродвигателем Ml); ВО — воспринимающий орган (трансформаторы тока ТА1, ТА2, ТАЗ и выпрямитель VZ); СО — сравнивающий орган (схема сравнения сигналов U0 и U); УО — усилительный орган (регулируемый выпрямитель б); ИО — исполнительный орган (электродвигатель Ml в режиме динамического торможения, редуктор и барабан)
Для элементов структурной схемы на рисунке 3.6.10 передаточные функции и уравнения следующие.
Передаточная функция объекта регулирования по регулирующему воздействию
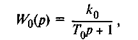
где ko — передаточный коэффициент, А • с/м; T0 — постоянная времени, с.
Передаточная функция воспринимающего органа

где kB — передаточный коэффициент, В/А.
Передаточная функция усилительного органа

где ky — коэффициент усиления регулируемого выпрямителя.
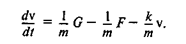
Упрощенное дифференциальное уравнение движения исполнительного органа [6]

где т — приведенная масса вращающихся и поступательно движущихся частей ЦПО к ободу барабана, G — сила тяжести ЦПО, Л — сила реакции монолита корма при работе ЦПО, F— тормозная сила, создаваемая двигателем Ml в режиме динамического торможения

Рис. 3.6.10. Структурная схема САР
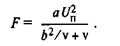
где k — константа, зависящая от физико-механических свойств силоса. Тормозная сила

где а, Ь — константы, зависящие от параметров электродвигателя, передаточного числа редуктора и радиуса барабана.
Решим нелинейное уравнение (3.6.1) относительно производной в следующем виде:
Тогда исполнительный орган можно представить в виде структурной схемы, показанной на рисунке 3.6.11.
Как показали исследования, исполнительный орган обладает инвертирующим свойством: с ростом и„ скорость v уменьшается, а при уменьшении Un — увеличивается [6]. С учетом инвертирующих особенностей исполнительного органа и его схемы (см. рис. 3.6.11) исходная структурная схема САР (см. рис. 3.6.10) примет вид, показанный на рисунке 3.6.12.
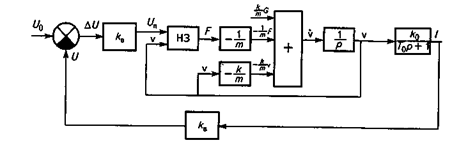
Рис. 3.6.12. Развернутая структурная схема САР
Данная структурная схема служит основой при выполнении индивидуальных заданий с учетом следующих значений параметров САР: T0 = 0,003 с; k0 = 696 А- с/м; kB = 1,76 В/А; kv = 2, m = = 5760 кг; G = 56 505 Н; k = 28 300 Н • с/ м; а = 0,01; b = 0,01 м/с; Uo = 3 В, а также при различных формах записи нелинейной зависимости (6.2), указанных в приведенных ниже вариантах.
Вариант 1 Нелинейное звено (НЗ) в структурной схеме (см. рис. 3.6.12) описывается зависимостью (3.6.2).
Вариант 2. Нелинейное звено (НЗ) в структурной схеме (см. рис. 3.6.12) описывается формулой
Вариант 3. Нелинейное звено в структурной схеме (см. рис. 3.6.12) описывается формулой
Вариант 4. Нелинейное звено в структурной схеме (см. рис. 3.6.12) описывается формулой
Вариант 5. Нелинейное звено в структурной схеме (см. рис. 3.6.12) описывается формулой
где А = 0,01; В= 100.
Вариант 6. Нелинейное звено в структурной схеме (см. рис. 3.6.12) описывается формулой
где С = 100; D = 10 000.
Вариант 7. Нелинейное звено в структурной схеме (см. рис. 3.6.12) описывается формулой

где С = 100; D = 10 000.
Порядок выполнения индивидуального задания. На основе структурной схемы (см. рис. 3.6.12) для заданного варианта функциональной зависимости нелинейного звена (НЗ) подготовьте исходные данные для компьютерного моделирования САР загрузки рабочего органа траншейного выгрузчика силоса. Cоставьте структурную схему моделирования САР. Основываясь на рекомендациях раздела 2, определите параметры интегрирования (шаг, время интегрирования) и число точек выдачи данных, задайте метод интегрирования.
По аналогии с демонстрационным примером выполните компьютерное моделирование заданной САР и по графику переходного процесса оцените ее качество.
Содержание отчета: структурная схема САР; ее структурная схема моделирования; числовые данные, необходимые для работы в среде ПК «МВТУ»; график переходного процесса; результаты оценки качества системы; выводы.
Контрольные вопросы и задания
1. Что представляет собой нелинейная САР? 2. Какова сущность линеаризации нелинейных статических характеристик на основе ряда Тейлора? 3. Составьте структурную схему моделирования нелинейной функциональной зависимости у = - ах2 с использованием блоков библиотеки «Функции математические» ПК «МВТУ». 4. Составьте структурную схему моделирования нелинейной зависимости у = k/x с использованием блоков Функции математические ПК «МВТУ» 5. Каковы назначение и возможности блока Новый ПК «МВТУ» при моделировании нелинейных САР? 6. Каков принцип работы САР температуры в инкубаторе? 7. Почему САР температуры в инкубаторе является нелинейной? 8. Каков принцип работы САР загрузки рабочего органа траншейного выгрузчика силоса? 9. Почему САР загрузки рабочего органа выгрузчика силоса относится к классу нелинейных систем? 10. Какие исходные данные необходимы для моделирования САР в среде ПК «МВТУ»?








