 2015-07-02
2015-07-02 632
632Характерным для кранов является повторно-кратковременный режим работы механизмов. Последние, в зависимости от вида статической нагрузки и технологических требований, с точки зрения электропривода, подразделяется на две группы. В одну группу входят механизмы подъема. Нагрузка данных механизмов создает момент, направление действия которого зависит от направления движения, т.е. момент является активным. При подъеме груза момент действует встречно движению, и двигатель работает в I квадрате плоскости Мω в двигательном режиме на характеристике 1 (рисунок 8). Для торможения может применяться динамическое торможение по характеристике 2. При спуске груза момент, создаваемый весом груза, направлен согласно с направлением движения. Если его величина превышает момент от трения в механической передачи, то двигатель работает в IV квадрате, на характеристике 3в рекуперативном режиме, либо на характеристике 4 в режиме противовключения. Если момент, создаваемый весом груза, оказывается меньше момента от трения, то двигатель работает в двигательном режиме на характеристике 5. Для торможения может применяться динамическое торможение - характеристика 6.
Во вторую группу крановых механизмов входят механизмы передвижения (тележки, моста, крана) и механизмы поворота. Момент сопротивления двигателей этих механизмов определяется действием только сил трения. Он направлен всегда встречно движению и является реактивным. В зависимости от направления движения двигатель работает в I или в III квадратах плоскости Мω в двигательном режиме на характеристиках I и I' (рисунок 9).
Для торможения применяются динамическое - характеристики 2 и 2', торможение противовключением – характеристики 3 и 3'.
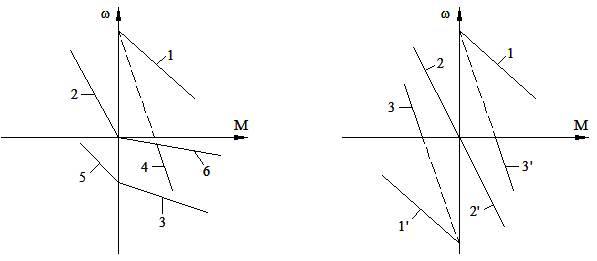
Рисунок 8 Рисунок 9








