 2015-07-03
2015-07-03 654
654Программные АСР отличаются от систем стабилизации тем, что задание в них не постоянно, а изменяется по заранее заданной программе. Программные АСР нашли широкое применение при автоматизации периодических процессов, при автоматизации операций пуска и останова объектов и т.п. При реализации схем программного регулирования обычно используют такую же станцию управления, как и в стабилизирующих АСР. Однако в этом случае для изменения задания применяют программный задатчик, присоединяемый к штеккеру 6 (рис. 4.6). Вторичный прибор при этом должен иметь 4 измерительные шкалы, так как теперь необходимо контролировать и сигнал от задатчика. Программа изменения задания определяется профилем кулачка программного задатчика и скоростью его вращения.
Переключение АСР с режима автоматической стабилизации на программное регулирование осуществляется нажатием кнопки АП в переключателе 2КП. Переключение производится в момент, когда сигналы программного и ручного задатчиков равны. При этом происходит переключение пневмоконтакта 3 так, что камера задания регулятора соединяется через штеккер 6, пневмоконтакт 3 и штеккер 5 с выходом программного задатчика.
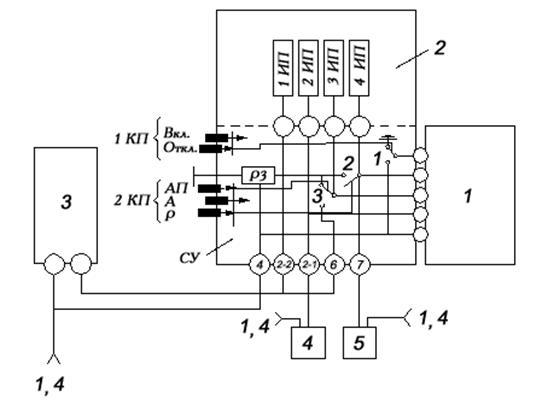
Рис. 4.6. Блок-схема пневматической программной АСР:
1 – регулятор; 2 – вторичный прибор со станцией управления; 3 – программный задатчик;
4 – пневматический датчик; 5 – регулирующий орган.
Переключение АСР с режима программного регулирования на автоматическую стабилизацию или на ручное дистанционное управление осуществляется нажатием соответствующей кнопки в переключателе 2КП. Для обеспечения «безударного» перехода предварительно при отключенном регуляторе (нажата кнопка «Откл.» переключателя 1КП) выполняют корректировку сигнала ручного задатчика до нужного значения.








