 2015-07-04
2015-07-04 773
7732.5.1. Исследование нелинейной следящей системы
с двухпозиционным реле с зоной неоднозначности
На рис. 2.18 приведена упрощенная схема исследуемой системы.

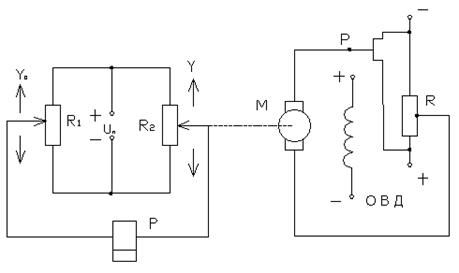
Рис. 2.18. Функциональная схема следящей системы с двухпозиционным реле с зоной неоднозначности
При перемещении движка реостата R 1 (задатчика) мост разбалансируется и через обмотку поляризованного реле P начнет протекать ток, что вызовет замыкание контактов этого реле в цепи якоря двигателя M, который начнет вращаться и переместит движок датчика R 2, стремясь восстановить равновесие моста. Таким образом, движок R 2 «следит» за движком R 1.
 Структурная схема следящей системы с двухпозиционным реле с зоной неоднозначности представлена на рис. 2.19.
Структурная схема следящей системы с двухпозиционным реле с зоной неоднозначности представлена на рис. 2.19.
Рис. 2.19. Структурная схема следящей системы с двухпозиционным реле с зоной неоднозначности
На этой схеме: y 0 – задающее воздействие; y (t) – регулируемая величина.
 Нелинейный элемент (поляризованное реле) имеет характеристику, приведенную на рис. 2.20.
Нелинейный элемент (поляризованное реле) имеет характеристику, приведенную на рис. 2.20.
Рис. 2.20. Статическая характеристика поляризованного реле
Пусть параметры системы таковы:
- электромеханическая постоянная времени двигателя T = 0,1 с (электромагнитной постоянной времени пренебрегаем);
- коэффициент передачи линейной части K = 10 рад/В;
- параметры нелинейного элемента (см. рис. 2.20) b = 5, c = 1.
Коэффициенты гармонической линеаризации для реле с заданной характеристикой определяются следующим образом
 ,
,  при A ³ b.
при A ³ b.
Уравнение гармонического баланса
 .
.
Частотная функция линейной части
 ,
,
где действительная часть
 ,
,
а мнимая часть
 .
.
Обратная инверсная частотная функция нелинейного элемента, полученная в результате гармонической линеаризации, после достаточно громоздких преобразований
 ,
,
где действительная часть
 ,
,
мнимая часть
 .
.
Можем записать V (w) = V (A), или
 ,
,
откуда

или
 .
.
После подстановки числовых значений параметров получим уравнение
 ,
,
действительный корень которого дает частоту автоколебаний wa = 2,407 рад/с» 2,41 рад/с.
Запишем уравнение гармонического баланса в другом виде
 .
.
Здесь
 ;
;
 .
.
Можно записать  , т.е.
, т.е.
 ,
,
откуда амплитуда автоколебаний
 .
.
Эту же задачу можно решить графоаналитическим методом, построив АФХ линейной части и АФХ нелинейного элемента. Точка пересечения характеристик соответствует искомым параметрам автоколебаний (рис. 2.21).
 |
Рис. 2.21. К определению параметров автоколебаний
графоаналитическим методом
Модель исследуемой системы в Simulink приведена на рис. 2.22.
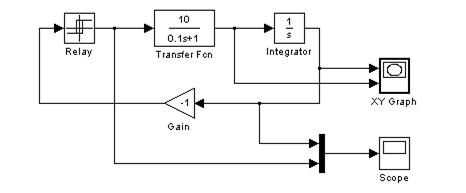
Рис. 2.22. Модель НС с двухпозиционным реле с зоной
неоднозначности в Simulink
|
|
 а) |
 б) |
Рис. 2.23. Результаты моделирования НС с двухпозиционным реле:
а) график переходного процесса; б) фазовая траектория
Период колебаний Tk = 2,45 с. Частота колебаний  рад/с, а амплитуда A @ 5,14, что практически совпадает с результатами расчета.
рад/с, а амплитуда A @ 5,14, что практически совпадает с результатами расчета.








