 2015-07-14
2015-07-14 513
513Обратимся к рассмотрению работы машины тормозом. Этот режим работы (при s > l) иногда применяется при необходимости быстро затормозить механизм, приводимый во вращение асинхронным двигателем. В этом случае применяется та же схема, что и при реверсировании двигателя (рис. 3-46).
Рис. 3-46. Схема для реверсирования двигателя (изменения направления вращения) и для перевода его в режим работы тормозом (для сокращения времени выбега).
Для перевода машины в тормозной режим нужно изменить в ней направление вращения поля, что делается при помощи показанного на рис. 3-46 переключателя.
Если тормозной режим используется только для быстрой остановки машины, то устойчивость этого режима не имеет значения; но иногда требуется длительная работа машины в режиме тормоза, например в случае, когда рабочим механизмом является подъемный кран. Такая работа также должна быть устойчивой. На рис. 3-47 приведены кривые M = f (s): 1 — при обычном сопротивлении  , обмотки ротора, 2 — при увеличенном сопротивлении цепи ротора
, обмотки ротора, 2 — при увеличенном сопротивлении цепи ротора  , где
, где  — добавочное сопротивление (приведенное к обмотке статора), вводимое в цепь ротора; здесь же приведена кривая M ст = f (s) подъемного крана.
— добавочное сопротивление (приведенное к обмотке статора), вводимое в цепь ротора; здесь же приведена кривая M ст = f (s) подъемного крана.
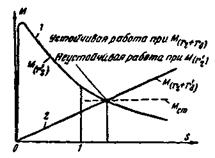
Рис. 3-47. Устойчивость работы машины в тормозном режиме.
Очевидно, только при второй кривой M = f (s) работа в тормозном режиме будет устойчивой, так как здесь  <
<  . Следовательно, для устойчивой работы тормозом нужно в цепь ротора включить относительно большое сопротивление , что приводит также к уменьшению тока в обмотке ротора, а следовательно, и в обмотке статора.
. Следовательно, для устойчивой работы тормозом нужно в цепь ротора включить относительно большое сопротивление , что приводит также к уменьшению тока в обмотке ротора, а следовательно, и в обмотке статора.
3-15. Схемы замещения
Теория асинхронной машины основана на ее аналогии с трансформатором (§ 3-7 — 3-12). Необходимые величины и зависимости, характеризующие работу вращающейся машины, можно получить, заменив ее неподвижной машиной, работающей как трансформатор. При этом активное сопротивление роторной цепи, как указывалось, должно быть взято равным  .
.
На основе полученных ранее уравнений мы можем получить, так же как для трансформатора, схему замещения асинхронной машины, позволяющую легко найти соотношения между величинами, характеризующими ее работу.
Обратимся к уравнению (3-123) и перепишем его в следующем виде:
 . (3-137)
. (3-137)
Выражению в скобках соответствует сопротивление схемы, приведенной на рис. 3-48.
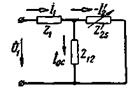
Рис. 3-48. Схема замещения синхронной машины (Т-образная).
Уравнения напряжений и токов для этой схемы, составленные согласно законам Кирхгофа, будут такие же, как для машины [уравнения (3-115)— (3-117)]. Поэтому она называется схемой замещения асинхронной машины. Можем написать:
 , (3-138)
, (3-138)
где  — сопротивление роторной обмотки при s = l.
— сопротивление роторной обмотки при s = l.
Активное сопротивление  можно рассматривать как внешнее сопротивление, включенное в обмотку неподвижного ротора. Машина в этом случае работает как трансформатор, имеющий чисто активную нагрузку. Электрическая мощность
можно рассматривать как внешнее сопротивление, включенное в обмотку неподвижного ротора. Машина в этом случае работает как трансформатор, имеющий чисто активную нагрузку. Электрическая мощность  , отдаваемая таким трансформатором, равна механической мощности
, отдаваемая таким трансформатором, равна механической мощности  , развиваемой ротором при работе машины, например двигателем со скольжением s, что следует из полученного ранее равенства (3-70 а) или (3-100).
, развиваемой ротором при работе машины, например двигателем со скольжением s, что следует из полученного ранее равенства (3-70 а) или (3-100).
Можно вместо схемы рис. 3-48 получить схему, более удобную для исследования асинхронной машины, позволяющую составить простые расчетные формулы для токов, мощностей, cos  и построить круговую диаграмму.
и построить круговую диаграмму.
Из схемы рис. 3-48 следует:
 . (3-139)
. (3-139)
Подставив это значение  в уравнение токов
в уравнение токов  , получим:
, получим:
 ;
;
отсюда имеем:
и
 , (3-140)
, (3-140)
где  [см. также (3-126)];
[см. также (3-126)];
 . (3-141)
. (3-141)
— ток синхронизма, т. е. ток, потребляемый машиной при синхронной скорости вращения, при s = 0 (рис. 3-48).
Учитывая (3-141) и (3-127), перепишем уравнение (3-140) в следующем виде:
 . (3-142)
. (3-142)
Уравнениям (3-140) и (3-142) соответствует схема замещения, представленная на рис. 3-49.
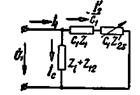
Рис. 3-49. Г-образная схема замещения асинхронной машины.
Ее можно назвать Г-образной схемой замещения асинхронной машины. Она позволяет значительно проще, чем схема рис. 3-48, рассчитать токи  и
и  при любом значении s, так как здесь легко определяется ток
при любом значении s, так как здесь легко определяется ток  , который не зависит от s. Исследование асинхронной машины при помощи приведенной на рис. 3-49 схемы замещения облегчается еще тем, что комплекс C 1 в обычных условиях можно заменить его модулем с,. Только при точных исследованиях малых машин (при Р н < 1 кВт) и в специальных случаях, когда аргумент
, который не зависит от s. Исследование асинхронной машины при помощи приведенной на рис. 3-49 схемы замещения облегчается еще тем, что комплекс C 1 в обычных условиях можно заменить его модулем с,. Только при точных исследованиях малых машин (при Р н < 1 кВт) и в специальных случаях, когда аргумент  в выражении С 1 =
в выражении С 1 =  больше 2—3°, следует его учитывать.
больше 2—3°, следует его учитывать.
3-16. Параметры асинхронной машины
Параметры рассмотренных схем замещения являются в то же время параметрами асинхронной машины. Они могут быть определены расчетным или опытным путем.
При определении их расчетным путем нужно иметь геометрические размеры машины (наружный и внутренний диаметры статора, то же для ротора, длину воздушного зазора  между статором и ротором, их длины по оси, а также размеры пазов и зубцов статора и ротора) и ее обмоточные данные (числа витков, их средние длины, сечения проводников и шаги обмоток, числа пазов). Мы будем здесь рассматривать только основные методы расчета параметров, имея в виду установить их связь с геометрическими размерами машины и ее электромагнитными нагрузками.
между статором и ротором, их длины по оси, а также размеры пазов и зубцов статора и ротора) и ее обмоточные данные (числа витков, их средние длины, сечения проводников и шаги обмоток, числа пазов). Мы будем здесь рассматривать только основные методы расчета параметров, имея в виду установить их связь с геометрическими размерами машины и ее электромагнитными нагрузками.
Под последними понимаются индукции в отдельных участках магнитной цепи машины, линейная нагрузка (условная величина), А/см,
 , (3-143)
, (3-143)
плотности тока для статорной и роторной обмоток:  и
и  , А/мм2.
, А/мм2.
а) Ток холостого хода и сопротивление Z12.
Сопротивление Z 12 ветви намагничивания (рис. 3-48) найдем, определив реактивную I ср и активную I са составляющие тока синхронизма I с.
Реактивная составляющая I ср, которая может быть названа намагничивающим током, практически равна реактивной составляющей I ор тока холостого хода. Для ее определения нужно произвести расчет магнитной цепи машины, т. е. рассчитать н. с.  , могущую создать поток Ф, необходимый для наведения э. д. с.
, могущую создать поток Ф, необходимый для наведения э. д. с.  .
.
Поток Ф находим по (3-77). По потоку Ф, зная сечения зубцов и ярм статора и ротора, определяем индукции в соответствующих участках магнитной цепи. Затем, пользуясь кривыми намагничивания для стали, из которой выполняется статор и ротор, находим для рассчитанных индукций напряженности поля и, умножая их на длины участков, находим магнитные напряжения этих участков.
Наибольшее магнитное напряжение приходится на воздушный зазор, максимальная индукция в котором
 , (3-144)
, (3-144)
где  (кривая поля вследствие насыщения главным образом зубцов статора и ротора несколько отличается от синусоиды, поэтому вместо
(кривая поля вследствие насыщения главным образом зубцов статора и ротора несколько отличается от синусоиды, поэтому вместо  берется ); l — длина статора по оси за вычетом радиальных вентиляционных каналов. Для нормальных машин (от 0,6 кВт и выше)
берется ); l — длина статора по оси за вычетом радиальных вентиляционных каналов. Для нормальных машин (от 0,6 кВт и выше)  Гс.
Гс.
Магнитное напряжение воздушного зазора
 , (3-145)
, (3-145)
где  — коэффициент, учитывающий увеличение магнитного сопротивления воздушного зазора вследствие наличия пазов на статоре и роторе: его значение k d = 1,1÷1,5 (при открытых пазах оно больше, чем при полузакрытых).
— коэффициент, учитывающий увеличение магнитного сопротивления воздушного зазора вследствие наличия пазов на статоре и роторе: его значение k d = 1,1÷1,5 (при открытых пазах оно больше, чем при полузакрытых).
Магнитные напряжения стальных участков магнитной цепи при обычных насыщениях составляют в сумме примерно (0,2  0,5) F d. Следовательно, мы можем написать:
0,5) F d. Следовательно, мы можем написать:
 (3-146)
(3-146)
где k н = 1,2÷1,5 — коэффициент насыщения. Такие значения для k н получаются, если индукции имеют обычные значения для зубцов — 14000 19000 Гс, для ярм — 10000 15000 Гс.
Согласно (3-59) и (3-146) реактивная составляющая
 (3-147)
(3-147)
Разделив обе части равенства на I1н, получим относительное значение
 (3-148)
(3-148)
Если сюда подставить (3-145) и учесть (3-143), а также равенство  , то получим:
, то получим:
 (3-149)
(3-149)
Уравнение (3-149) показывает, что относительное значение тока I 0р зависит главным образом от  , так как
, так как  для нормальных машин колеблется в сравнительно небольших пределах.
для нормальных машин колеблется в сравнительно небольших пределах.
При рассмотрении круговой диаграммы асинхронной машины (§ 3-17) мы увидим, что cosj1 двигателя зависит в основном от тока I 0р. Поэтому для улучшения cosj1 воздушный зазор d выбирается по возможности небольшим; при этом приходится считаться с необходимостью получить механически надежную машину, изготовление и установка которой не вызывают больших затруднений. Значения d для нормальных машин приведены в табл. 3-4.
Та6лица 3-4.
Воздушный зазор нормальных асинхронных машин
| Мощность, кВт | До 0,2 | 0,2- -1,0 | 1,0- -2,5 | 2,5- -5 | 5- -10 | 10- -20 | 20- -50 | 50- -100 | 100- -200 | 200- -300 |
| δ, мм при 3000 об/мин | 0,25 | 0,3 | 0,35 | 0,4 | 0,5 | 0,65 | 0,8 | 1,0 | 1,25 | 1,5 |
| δ, мм при 1500 500 об/мин
| 0,2 | 0,25 | 0,3 | 0,35 | 0,4 | 0,4 | 0,5 | 0,65 | 0,8 | 1,0 |
Для тихоходных машин (при большом числе полюсов) величина [см. (3-149)] больше, чем для быстроходных (при малом числе полюсов). Этим и объясняется то, что тихоходные машины имеют более низкие значения cosj1.
Активная составляющая I с.а тока синхронизма зависит главным образом от потерь в стали статора P c1, вызванных основным полем, соответствующим главному потоку, и от электрических потерь 
 :
:
 (3-150)
(3-150)
Следовательно, ток синхронизма
 (3-151)
(3-151)
Теперь мы можем рассчитать Z 12 = r12 + jx 12:
 (3-152)
(3-152)
Указанные параметры целесообразно выразить в относительных единицах, приняв, так же как для трансформаторов (см. § 2-15), за базисную единицу сопротивлений  . Тогда получим, д.е.:
. Тогда получим, д.е.:
 (3-153)
(3-153)
Для нормальных машин значения  и
и  колеблются в следующих пределах = 0,5÷0,1 д.е. (уменьшается с увеличением Р н и 2 p), = 4,5÷1,5 д.е. (уменьшается с увеличением 2 р).
колеблются в следующих пределах = 0,5÷0,1 д.е. (уменьшается с увеличением Р н и 2 p), = 4,5÷1,5 д.е. (уменьшается с увеличением 2 р).
При определении тока холостого хода I 0 нужно учесть еще его активную составляющую, соответствующую механическим потерям Р мех (на трение вращающихся частей о воздух, в подшипниках и щеток о контактные кольца, если они имеются), а также пульсационным и поверхностным потерям в зубцах ротора и статора Р с.д (при прохождении зубцов ротора под зубцами статора поле в них пульсирует с большой частотой, то же мы имеем для зубцов статора, кроме того, в сравнительно неглубоких поверхностных слоях зубцов ротора и статора получается неравномерное распределение поля из-за наличия пазов на противоположной части, изменяющееся при вращении ротора). Указанные потери покрываются за счет механической мощности, развиваемой ротором.
Таким образом, активная составляющая тока холостого хода
 , (3-154)
, (3-154)
где  , и ток холостого хода
, и ток холостого хода
 . (3-155)
. (3-155)
Для нормальных машин в обычных случаях (2 p = 2 10)
 . (3-156)
. (3-156)








