 2015-07-21
2015-07-21 2706
2706Методы последовательного сравнения – это методы, в которых отраженные сигналы принимаются и сравниваются последовательно в одной точке приема, но при разных положениях ДН антенны относительно РСН.
В зависимости от способа перемещения ДН антенны относительно геометрической оси антенной системы различают методы последовательного сравнения:
- с секторным сканированием;
- с коническим сканированием.
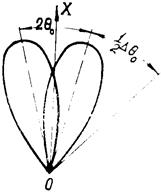
Сущность секторного сканирования заключается в том, что максимум ДН антенны совершает угловые скачкообразные перемещения ±Θ0 относительно оси ОХ из положения 1 в положение 2 (рис.7.7).
|
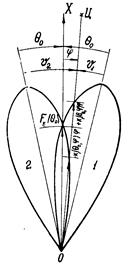
Измерение угловых координат при секторном сканировании состоит в определении угла φ и направления отклонения цели относительно оси ОХ, которая и является РСН.
При секторном сканировании перемещение ДН антенны происходит в одной плоскости. Поэтому принципиально возможно определение только одной угловой координаты цели. Для одновременного определения двух угловых координат цели необходимо применять две антенны.
Допустим, что антенна работает только на прием и ДН антенны по напряжению описывается зависимостью FE(θ).
Амплитуда отраженных от цели сигналов зависит от угла отклонения цели относительно максимума ДН антенны θ и определяется выражением:
Um(θ) = kGE(θ),
где: k – коэффициент пропорциональности;
GE(θ) – КНД антенны по напряжению в направлении θ.
КНД и ДН антенны связаны соотношением:
GE(θ) = GE(0) FE(θ),
где: GE(0) – КНД но напряжению в направлении максимума ДН.
Отсюда:
Um(θ) = kGE(0) FE(θ) = Um(0) FE(θ),
где: Um(0) – амплитуда сигнала в направлении максимума ДН.
При секторном сканировании θ = θ(t).
Следовательно:
Um(t) = Um(0) FE[θ(t)].
В данном случае функция θ(t) принимает два значения:
θ1 = Θ0 – φ
θ2 = Θ0 + φ.
В общем виде она описывается выражением:
θ(t) = Θ0 – φf(t).
Конкретный вид функции f(t) определяется законом перемещения ДН в пространстве. При секторном сканировании f(t) имеет вид:
f(t) = f(ωt – α),
где: ω = 2π/T – круговая частота периодических перемещений ДН;
α – фазовый сдвиг функции f(t) (α = 0, если направление отклонения цели совпадает с направлением отклонения ДН в первый полупериод; α = π, если эти направления не совпадают).
Тогда амплитуда радиоимпульсов, принимаемых антенной:
Um(t) = Um(0) FE[Θ0 – φf(ωt – α)].
Вид радиоимпульсов, принимаемых антенной при секторном сканировании, показан на рис.7.8.
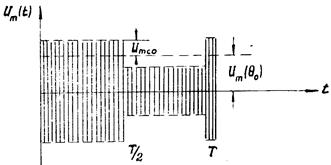
Рис.7.8. Вид радиоимпульсов при секторном сканировании.
Так как между углом φ и приращением радиус-вектора ДН существует функциональная связь, то
Um(t) = Um(0) [FE(Θ0) + k1(Θ0,φ) φf(ωt – α)],
где: k1(Θ0,φ) – коэффициент пропорциональности, связывающий приращение радиус-вектора ДН с углом φ.
Знак в квадратных скобках изменен на том основании, что положительному приращению радиус-вектора соответствует уменьшение угла θ, а отрицательному приращению – увеличение этого угла.
Обозначим:
β =  - константа, зависящая от формы ДН и угла Θ0.
- константа, зависящая от формы ДН и угла Θ0.
Тогда после преобразования
Um(t) = Um(Θ0) [1 + βφf(ωt – α)],
где: Um(Θ0) = Um(0) FE(Θ0) – постоянная составляющая амплитуды импульсов (амплитуда импульсов при φ = 0).
Uso(t) = Um(Θ0) βφf(ωt – α) – огибающая принимаемых импульсов или сигнал ошибки. Здесь:
Um so = Um(Θ0) βφ – амплитуда сигнала ошибки;
α – фаза сигнала ошибки.
Сигнал ошибки содержит полную информацию о величине и направлении отклонения цели, т.к. амплитуда сигнала ошибки пропорциональна величине угла отклонения цели φ, афаза сигнала ошибки зависит от направления отклонения цели относительно оси ОХ.
Для того чтобы исключить зависимость амплитуды сигнала ошибки от мощности принимаемого сигнала сигнал ошибки нормируется.
Нормированная функция сигнала ошибки определяется выражением:
Sso(t) = Uso(t)/ Um(Θ0) = βφ f(ωt – α)
Sm so = βφ – амплитуда нормированной функции сигнала ошибки;
α – фаза нормированной функции сигнала ошибки.
Следовательно, при секторном сканировании информация об угловых координатах цели содержится в параметрах нормированной функции сигнала ошибки, т.к. амплитуда нормированной функции сигнала ошибки пропорциональна величине углового отклонения цели φ, а фаза – зависит от направления отклонения цели относительно оси ОХ.
Амплитуда нормированной функции сигнала ошибки по физическому смыслу представляет собой коэффициент глубины амплитудной модуляции импульсов m. Действительно,
m = Um so/Um(Θ0) = βφ = Sm so
При φ = 0 (направление на цель совпадает с направлением оси ОХ) сигнал ошибки равен нулю и амплитуда импульсов остается постоянной, т.е.
Um(t) = Um(Θ0) = const.
Следовательно, ось ОХ при секторном сканировании действительно является равносигнальным направлением (РСН).
Для одновременного определения обеих угловых координат цели при секторном сканировании необходимо применять две антенны. Однако того же эффекта можно достичь, если перемещать ДН антенны одновременно в двух плоскостях, что соответствует случаю конического сканирования.
Сущность конического сканирования заключается в том, что максимум ДН антенны перемещается с постоянной угловой скоростью ω по поверхности конуса с углом 2Θ0 при вершине. При этом ось конуса соответствует геометрической оси антенны и является РСН.
Схема конического сканирования показана на рис.7.9.
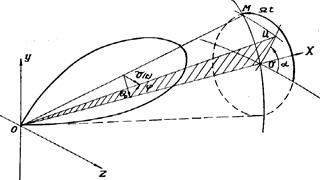
Рис.7.9. Сущность конического сканирования.
Допустим, что антенна работает только на прием и ДН антенны по напряжению описывается зависимостью FE(θ).
Амплитуда принимаемых радиоимпульсов, как и при секторном сканировании, может быть представлена в виде:
Um(t) = Um(0) FE[θ(t)].
Определим функцию θ(t). Рассмотрим сферический треугольник МЦО’. В соответствии с теоремой косинусов для сферического треугольника МЦО’ можно записать:
сos θ(t) = cosφcosθ0 + sinφsinθ0cos(ωt – α)
Из основных формул тригонометрии также следует:
cosθ(t) = [1 – sin2θ(t)]1/2;
cosφ = (1 – sin2φ)1/2;.
cosΘ0 = (1 – sin2 Θ0)1/2.
В связи с высокой направленностью антенны, углы θ(t), φ и Θ0 можно считать малыми и заменить синусы этих углов самими углами:
cosθ(t) = [1 – θ2(t)]1/2 ≈ 1 – 1/2 θ2(t);
cosφ = (1 – φ2)1/2 ≈ 1 – 1/2φ2;
cosΘ0 = (1 – Θ20)1/2 ≈ 1 – 1/2Θ20.
Тогда
θ(t) ≈ [Θ20 + φ2 – 1/2φ2θ20 – 2φΘ0cos(ωt – α)]1/2.
Для малых угловых отклонений φ «Θ0 и предыдущее выражение преобразуется к виду
θ(t) ≈ [Θ20 – 2φΘ0cos(ωt – α)]1/2 ≈ Θ0[1 – φ/Θ0 ∙ cos(ωt – α)] =
= Θ0 – φcos(ωt – α).
Отсюда
Um(t) = Um(0) FE[Θ0 – φ cos(ωt – α)].
Так как между углом φ и приращением радиус-вектора ДН существует функциональная связь, то можно записать
Um(t) = Um(0) [FE(Θ0) + k1(Θ0,φ) φ cos(ωt – α)],
где: k1(Θ0,φ) – коэффициент пропорциональности, связывающий приращение радиус-вектора ДН с углом φ.
Знак в квадратных скобках изменен на том основании, что положительному приращению радиус-вектора соответствует уменьшение угла θ, а отрицательному приращению – увеличение этого угла.
Обозначим:
β =  - константа, которая зависит от формы ДН и угла Θ0.
- константа, которая зависит от формы ДН и угла Θ0.
Тогда после преобразования получим
Um(t) = Um(Θ0) [1 + βφcos(ωt – α)]
Вид радиоимпульсов, принимаемых антенной при коническом сканировании, показан на рис.7.10.
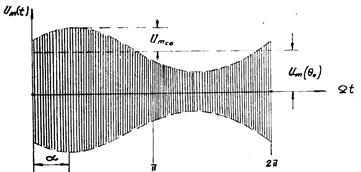
Рис.7.10. Вид радиоимпульсов при коническом сканировании.
Информация об угловых координатах цели содержится в параметрах нормированной функции сигнала ошибки, которая в этом случае равна:
Sso(t) = βφcos(ωt – α)
Таким образом, при коническом сканировании нормированная функция сигнала ошибки есть периодическая функция частоты сканирования, близкая к синусоиде.
Sm so = βφ – амплитуда нормированной функции сигнала ошибки;
α – фаза нормированной функции сигнала ошибки.
Амплитуда нормированной функции сигнала ошибки при коническом сканировании, как и в случае секторного сканирования, пропорциональна угловому отклонению цели φ, а фаза – зависит от направления отклонения цели относительно оси ОХ, которая является равносигнальным направлением.
Точность метода последовательного сравнения.
Потенциальная точность измерения угловых координат методом последовательного сравнения ε определяется его чувствительностью к предельно малым смещениям цели dθ относительно РСН и зависит от крутизны ДН антенны в точке θ = Θ0. При аппроксимации ДН антенны функцией FE(θ) и сканировании ДН только на прием точность метода последовательного сравнения:
ε =  , 1/рад.
, 1/рад.
При сканировании ДН на излучение и прием ДН описывается зависимостью F2E(θ). В связи с тем, что в этом случае радиоимпульсы модулируются по амплитуде дважды (при излучении и при приеме), точность метода последовательного сравнения ε' при сканировании ДН на излучение и прием в два раза лучше, чем при сканировании только на прием.
ε' = 2 F2E(θ) , 1/рад.
Для конкретного вида функции FE(θ) можно установить связь точности метода последовательного сравнения с углом Θ0 и шириной ДН антенны Δθ. В таблице 7.1. приведены расчетные формулы точности метода при некоторых аппроксимациях функции FE(θ) в зависимости от способа использования ДН антенны (сканирование только на прием или на излучение и прием).
Кроме того, в таблице 7.1. указаны оптимальные значения угла (Θ0)opt, которые обеспечивают максимальную чувствительность метода последовательного сравнения. Они определяются при выполнении условий:
 или
или  ,
,
где: ε, ε’ – точность метода последовательного сравнения при сканировании ДН соответственно только прием или на излучение и прием.
Отсюда следует, что для каждого вида ДН антенны существует свое максимально достижимое значение точности метода последовательного сравнения, которое зависит от ширины ДН и способа ее использования.
Расчет точности метода последовательного сравнения. Таблица 7.1.
| FE(θ) | Точность метода (ε или ε'), 1/рад | (Θ0)opt, рад | FE(Θ0) opt | εmax, 1/рад |
 | ε =   | 0,6Δθ | 0,61 | 1,02  |
ε’=   | 0,42Δθ | 0,78 | 1,43 | |
 | ε =  | 0,68Δθ | 0,51 | 1,15 |
ε’ =  | 0,46Δθ | 0,74 | 1,49 |
Таким образом, для достижения максимальной точности определения угловых координат методом последовательного сравнения необходимо сужать ширину ДН антенны, а РСН должно пересекать ДН антенны на уровне FE(Θ0)opt. Некоторое уменьшение дальности РЛС в направлении, близком к РСН, обычно не имеет решающего значения.
Разрешающая способность метода последовательного сравнения.
Исходя из принципа последовательного сравнения сигналов для раздельного определения угловых координат по двум целям необходимо, чтобы при совмещении РСН с направлением на одну из целей не принимался сигнал другой цели (рис.7.11).
|
Следовательно, угловая разрешающая способность метода последовательного сравнения:
δφ = Δθ0 + 2Θ0,
где: Δθ0 – ширина ДН антенны по нулевым радиус-векторам;
Θ0 – угол отклонения максимума ДН антенны от РСН.
Достоинство равносигнальных методов последовательного сравнения – высокая точность измерения угловых координат без существенного уменьшения дальности действия РЛС.
Недостаток равносигнальных методов последовательного сравнения – большие флюктационные ошибки измерения угловых координат, которые обусловлены амплитудными флюктуациями отраженных от цели сигналов, принимаемых в разные моменты времени.
Метод конического сканирования в настоящее время широко используется во всех системах с последовательным сравнением сигналов. Лишь в редких случаях, когда требуется определить угловую координату цели в одной заданной плоскости, коническое сканирование заменяется секторным сканированием в этой плоскости.








