 2015-07-21
2015-07-21 9285
9285Когерентно-импульсный метод широко используется в импульсных РЛС с селекцией движущихся целей (СДЦ). Главной задачей систем СДЦ является подавление сигналов от неподвижных объектов (пассивных помех). Поэтому в этих РЛС скорость целей обычно не измеряется, а доплеровское приращение частоты используется лишь как признак, позволяющий отделить отраженные сигналы движущихся целей от сигналов пассивных помех.
В зависимости от вида опорного сигнала, с которым производится сравнение отраженных от целей сигналов, различают системы СДЦ:
- с внутренней когерентностью;
- с внешней когерентностью.
Рассмотрим принцип измерения скорости цели на примере когерентно-импульсной РЛС с внутренней когерентностью (рис.8.6).
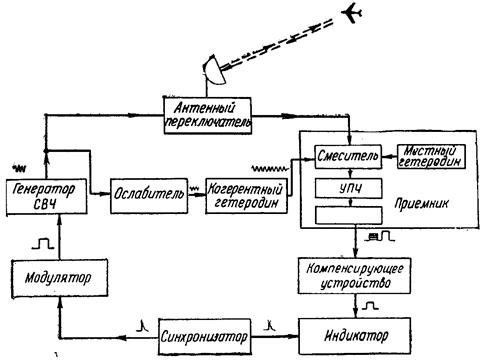
Рис.8.6. Структурная схема когерентно-импульсной РЛС
с внутренней когерентностью.
Отличительная особенность схемы – наличие когерентного гетеродина. Для фазирования когерентного гетеродина к нему через ослабитель подводятся колебания от генератора СВЧ. Поэтому когерентный гетеродин генерирует незатухающие синусоидальные колебания, фаза которых жестко связана с фазой колебаний генератора зондирующих колебаний.
После окончания импульса от генератора когерентный гетеродин продолжает генерировать собственные колебания с навязанной ему начальной фазой. При последующем импульсе от генератора колебаниям гетеродина будет навязана другая фаза, т.к. начальная фаза колебаний генератора (например, магнетрона) от импульса к импульсу меняется.
Синусоидальные колебания с выхода когерентного гетеродина подаются на смеситель приемника. Одновременно на смеситель приемника поступают отраженные сигналы, которые при движении цели приобретают фазовый сдвиг ∆φ относительно колебаний когерентного гетеродина.
Фазовый сдвиг ∆φ отраженного от цели сигнала пропорционален времени запаздывания tD и, учитывая что определяется выражением:
∆φ = ωtD = 2πf  =
=  , (т.к. c/f = λ)
, (т.к. c/f = λ)
Отсюда следует, что фазовый сдвиг ∆φ отраженного сигнала зависит от дальности до цели D.
Если цель неподвижна, то фазовый сдвиг между колебаниями отраженного сигнала и когерентного гетеродина не меняется и амплитуда импульсов на выходе приемника постоянна. Специальное компенсирующее устройство, расположенное после приемника, позволяет частично или полностью устранить сигналы от неподвижных целей.
При движении цели фаза отраженного сигнала меняется. Поэтому изменяется и амплитуда выходного сигнала приемника. Если длительность зондирующих импульсов мала, то изменением фазы отраженного сигнала за время длительности импульса можно пренебречь (за это время цель не успевает заметно переместиться в пространстве). Однако за период повторения импульсов цель проходит расстояние, соизмеримое с длиной волны λ, и отраженный от нее сигнал приобретает заметный фазовый сдвиг.
Если цель перемещается с постоянной радиальной скоростью Vr, то фазовый сдвиг отраженного от цели сигнала также меняется с постоянной скоростью по закону:
∆φ =
При перемещении цели на расстояние λ/2 фазовый сдвиг изменится на 2π. Затем фазовые соотношения повторяются. Поэтому амплитуда результирующего сигнала на входе приемника Um vx периодически изменяется от наименьшего значения, равного разности амплитуд Um kg – Um otr, до наибольшего значения, равного сумме амплитуд Um kg + Um otr (рис.8.7, а).
|
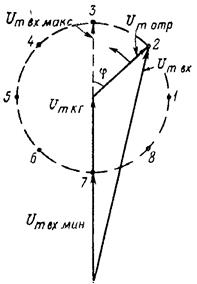
Рис.8.7. Изменение амплитуды импульсов:
а - на входе приемника; б - на выходе приемника.
Амплитуда видеоимпульсов на выходе приемника пропорциональна суммарному сигналу на его входе. Поэтому видеоимпульсы на выходе приемника оказываются промодулированными по амплитуде (рис.8.7,б). График амплитуды видеоимпульсов на выходе приемника построен из предположения, что за период модуляции ТM приходит восемь отраженных от цели импульсов (это соответствует восьми положениям вектора Um vx на рис.8.7,б).
Амплитуда видеоимпульсов изменяется с периодом TM, равным времени одного оборота Um vx, что соответствует времени перемещения цели на расстояние λ/2. Если цель двигается с постоянной радиальной скоростью Vr, то период модуляции:
ТM = λ/2Vr
Отсюда частота модуляции (частота биений):
FM = 1/TM = 2Vr/λ
Таким образом, амплитуда видеоимпульсов, образованных в результате биений отраженных сигналов и сигнала когерентного гетеродина изменяется с частотой Доплера. Следовательно, измеряя частоту модуляции видеоимпульсов на выходе приемника, можно определить радиальную скорость цели.
В общем случае частота модуляции импульсов (частота биений) связана с доплеровской частотой отраженного сигнала неоднозначно. График зависимости частоты модуляции FM от частоты Доплера FV приведен на рис.8.8.
|
|
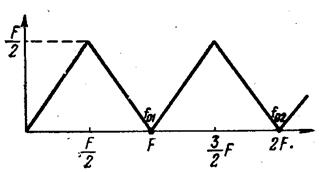
Рис.8.8. Зависимость частоты модуляции от частоты Доплера.
Из графика видно, что однозначное соответствие между частотой биений и частотой Доплера выполняется только при условии, что FV ≤ F/2,
где: F – частота повторения импульсов. При увеличении частоты Доплера частота модуляции сначала равномерно растет до значения FV = 0,5F, затем – равномерно убывает, апри значении FV = F обращается в нуль.
Это обусловлено тем, что если частота модуляции равна или кратна частоте повторения зондирующих импульсов, то фазовый сдвиг ∆φ за время модуляции TM равен 2πn. При этом фазовые соотношения между сигналом когерентного гетеродина и отраженным от цели сигналом не изменяются, а амплитуда сигнала на выходе приемника остается постоянной.
Таким образом, при значениях частоты Доплера FV = nF, n = 1, 2, 3, …, модуляция отраженных от цели импульсов и биения отсутствуют, несмотря на движение цели. Радиальные скорости целей, соответствующие таким значениям доплеровской частоты называются «слепыми» скоростями. Цель, движущаяся со «слепой» скоростью, не может быть обнаружена. РЛС воспринимает такую цель, как неподвижную.
Значения «слепых» скоростей можно найти по формуле:
Vrо n = FMλ/2 = nFλ/2,
где: n = 1, 2, 3, …целые числа.
Для борьбы с эффектом слепых скоростей применяется скачкообразное изменение частоты повторения зондирующих импульсов или работа на двух несущих частотах.
Достоинства когерентно-импульсного метода:
- позволяет избежать технических трудностей, возникающих в станциях с непрерывным излучением при развязке приемного и передающего каналов.
Недостатки метода:
- наличие «слепых» скоростей, при которых нельзя отличить движущуюся цель от неподвижной цели;
- невозможность отличить цель, обладающую нулевой радиальной скоростью, от пассивных помех;
Это обстоятельство смягчается тем, что реальные воздушные цели не могут в течение длительного времени иметь нулевую радиальную скорость, т.е. непрерывно летать по кругу вокруг РЛС.
- жесткие требования к стабильности частоты когерентного гетеродина и генератора передатчика;
Кратковременный уход частоты этих генераторов за время, соизмеримое с периодом следования зондирующих импульсов, создает эффект доплеровского смещения частоты сигналов. Это приводит к возникновению на выходе приемника паразитной амплитудной модуляции сигналов неподвижных целей и их не полное подавление компенсирующим устройством.
- необходимость компенсации собственной скорости объекта при установке когерентно-импульсных РЛС на движущихся объектах.
Это связано с тем, что вследствие взаимного движения РЛС и неподвижных целей (например, земной поверхности) сигналы, отраженные от неподвижных целей, также получают доплеровское смещение частоты, соответствующее скорости движения РЛС относительно цели. Компенсация собственной скорости РЛС осуществляется путем изменения частоты когерентного гетеродина и обычно связана с большими техническими трудностями.
Значительно проще компенсация собственной скорости РЛС осуществляется в когерентно-импульсных РЛС с внешней когерентностью.
Когерентно-импульсные РЛС с внешней когерентностью по принципу действия не отличаются от аналогичных РЛС с внутренней когерентностью. Основное отличие состоит в том, что РЛС с внешней когерентностью не имеют когерентного гетеродина. В качестве эталонных когерентных колебаний в таких РЛС используются сигналы, отраженные от неподвижных целей (например, земной или морской поверхности), находящихся в пределах разрешаемой площади РЛС.
В этом случае сигнал на входе приемника является результатом биений сигналов, отраженных движущейся целью и неподвижным фоном. Тогда разность доплеровских частот сигналов, отраженных целью и неподвижным фоном, определяется радиальной составляющей скорости цели относительно неподвижного фона (независимо от собственной скорости РЛС). Следовательно, компенсация собственной скорости в когерентно-импульсных РЛС с внешней когерентностью получается автоматически.
Эффективными в этом случае являются и импульсно-доплеровские РЛС.








