 2015-07-14
2015-07-14 974
974Intel 8051 — это однокристальный микроконтроллер (не путать с процессором) гарвардской архитектуры, который был впервые произведен Intel в 1980 году, для использования во встраиваемых системах. В течение 1980-х и начале 1990-х годов был чрезвычайно популярен, однако позже устарел и был вытеснен более современными устройствами, также с 8051-совместимыми ядрами, производимыми более чем 20 независимыми производителями такими как Atmel, Maxim IC (дочерняя компания Dallas Semiconductor), NXP, Winbond, Silicon Laboratories, Texas Instruments и Cypress Semiconductor).
Особенности базовой конфигурации:
· Шина данных — 8-ми битная шина данных. Возможность обработки 8 бит данных за одну операцию. Обуславливает название 8-битный микропроцессор
· Шина адреса — 16 битная адресная шина.
· Встроенное ОЗУ — 128 байт (Памяти данных)
· Встроенное ПЗУ — 4 КБ (Памяти программ)
· Четыре порта ввода/вывода: один двунаправленный и три квазидвунаправленных
· Универсальный асинхронный приёмопередатчик;
· Два 16-битных таймера;
· Два уровня приоритета прерываний;
· Энергосберегающий режим
Общей особенностью в современных 8051-совместимых микроконтроллерах стало встраивание улучшенных и дополнительных схем, таких как: автоматический сброс по падению питающего напряжения; встроенные тактовые генераторы; внутрисхемное программирование памяти программ; I²C; SPI (стандарт 3-проводной последовательной шины); USB хост-интерфейс; ШИМ-генераторы; аналоговых компараторов; АЦП и ЦАП преобразователей; часов реального времени; дополнительных таймеров и счетчиков; внутрисхемных отладчиков, дополнительных источников прерываний; расширенных энергосберегающих режимов.
8051-совместимые микроконтроллеры обычно имеют один или два УАПП (UART), два или три таймера. УАПП/UART может быть настроен для использования в режиме 9-бит данных, что делает возможным адресную приёмопередачу в многоточечном подключении на основе RS-485 аппаратного протокола.
Все 8051-совместимые устройства, производимые SILabs, некоторые из производимых Dallas и немногие из производимых Atmel имеют ядро с 1 тактом на машинный цикл.
Чрезвычайно полезной особенностью 8051-ядра является обработка булевых данных, что позволило ввести бинарную логику, оперирующую напрямую с битами внутренней ОЗУ (области из 128 прямо-адресуемых битов) и регистров. Данная особенность была востребована в приложениях промышленной автоматики. Еще одна ценная особенность состояла в 4 независимых наборах регистров, которые значительно уменьшали задержки при обработке прерываний, в сравнении с классическим использованием стека, применявшимся ранее.
Билет 2
2.
1) тривалий номінальний режим — режим роботи при незмінному номінальному навантаженні Рном, що продовжується стільки часу, що температура нагрівання усіх частин машини досягає сталих значень. Навантажувальна діаграма тривалого номінального режиму показана на рис.10.2,а. Умовне позначення режиму S1;
2) короткочасний номінальний режим — режим роботи, при якому періоди незмінного номінального навантаження чергуються з періодами відключення двигуна. При цьому періоди навантаження двигуна tн настільки короткочасні, що температури усіх частин двигуна не досягають сталих значень, а періоди відключення двигуна настільки тривалі, що усі частини двигуна встигають охолонути до температури навколишнього середовища (рис.3.1.2,6). Умовне позначення режиму S2;
3) повторювально-короткочасний номіналь-ний режим — режим роботи, при якому короткочасні періоди номінального навантаження двигуна tн чергуються з періодами відключення двигуна (паузами) tп, причому за період навантаження перевищення температури усіх частин не встигає досягти сталих значень, а за час паузи частини двигуна не встигають охолонути до температури навколишнього середовища. Загальний час роботи двигуна в повторювально-короткочасному режимі розділяється на періодично повторювані цикли tц = tн + tп. Умовне позначення режиму S3. При повторювально-короткочасному режимі роботи двигуна графік його нагрівання має вигляд пилкоподібної кривої (рис.3.1.2,в). При досягненні двигуном сталих значень температури відповідному повторювально-короткочасному режиму, tуст.к, температура перегрівання двигуна продовжує коливатися від tmin до tmax, при цьому вона менша установленої температури перегріву при номінальному тривалому режимі роботи tуст.
3.
В відповідності з вимогами ГОСТ 5876-69 якірно-швартові пристрої повинні виконувати наступні основні операції:
віддачу якоря при зупинці судна на якір;
стоянку на якорі при загальмованих ланцюгової зірочки і стопорі;
зйомку з якоря - підтягування судна до якоря, відрив і підйом, втягування якоря до клюзу. Зйомка судна з якоря повинна тривати не більше 30 хвилин.
забезпечувати швартування судна при віджимному вітрі до пяти балів.
Електродвигун якірно-швартового пристрою повинен:
Розвивати на основній робочій характеристиці, використаній в номінальному режимі роботи пристрою пусковий момент, створюючий на ланцюговій зірочці тягове зусилля, не менше двократного номінального і не більше половини пробного навантаження донного якірного ланцюга. Якщо пусковий момент електродвигуна створює зірочці зусилля більше за половину пробного навантаження якірного ланцюга, повинний бути передбачений захисний пристрій, розрахований на половину пробного навантаження;
Допускати стоянку під струмом 30-60 с, після роботи в нормальному режимі.
Якорно-швартовыые ЭП являются ответственным оборудованием, определяющим безопасность мореплавания. Они должны
быть гибкими и надежными в эксплуатации, обеспечивать широкуюманевренность и простоту управления. Регистр СССР предъявляетк якорно-швартовным ЭП следующие требования:
1. Мощность ЭП якорного механизма должна обеспечиватьвыбирание якорной цепи со скоростью, не меньшей 0,17 м/с, при
тяговом усилии (Н) на звездочке 2(рН + Ся).
2. Пусковой момент ЭП должен обеспечивать тяговое усилие не
менее 2Тг.
3. Привод якорно-швартовного механизма должен обеспечиватьодновременное выбирание двух свободно висящих якорей с половины номинальной глубины стоянки. Эта нагрузка создает усилие Т2 = 1,32т1! и таким образом регламентирует пуск ЭП при моментестатической нагрузки не ниже 130% номинального.
4. Привод швартовного механизма должен обеспечивать непре-рывное выбирание швартовного троса при номинальном тяговомусилии с номинальной скоростью в течение не менее 0,3 м/с.
5. Привод швартовного механизма должен развивать кратко-временно (около 15 с) усилие не менее 2-кратного номинальногои не выше 4-кратного номинального.
6. У якорно-швартовных шпилей, брашпилей и лебедок наступенях скоростей, предназначенных только для швартовных операций, должна быть предусмотрена соответствующая защита отперегрузки ЭП (например, автоматическое переключение со ступени, предназначенной для швартовной операции, на ступень, предназначенную для подъема якоря).
7. Стоянка под током при номинальном напряжении ЭД швартовных механизмов должна составлять не менее 15 с после 30 минработы при номинальной нагрузке, а якорных механизмов - 30 с.Автоматические швартовные лебедки удовлетворяют всем требованиям, относящимся к швартовным механизмам ручного управления. Дополнительно они должны быть снабжены указателемфактического натяжения и иметь звуковую сигнализацию на случай,когда изменение длины швартовного накала при автоматическомрежиме работы будет превосходить максимально допустимое значение.
4.
Паралельна робота генераторів постійного струму. Умови вмикання та наслідки порушення цих умов. Розподілення навантаження
Условия включения на параллельную работу. Таких условий два:
1) полярность зажимов подключаемого генератора должна соответствовать полярности шин;
2) ЭДС подключаемого генератора должна равняться напряжению на шинах.
а) 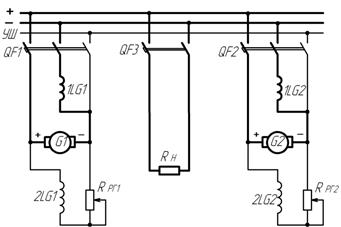 | 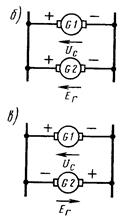 |
| Рисунок 15.1. Принципиальная схема параллельной работы генераторов постоянного тока смешанного возбуждения (в), схемы замещения цепей обмоток якорей при соответствии (б) и несоответствии (в) полярности шин и генератора |
Пусть на шины включен генератор G1, а генератор G2 вводится в работу. Если оба условия выполнены, то после включения генератора G2 на шины вцепи, образованной последовательно соединенными обмотками якорей генераторов, ЭДС Ег и напряжение Uc действуют встречно и взаимно компенсируются (рис. 15.1, б). Поэтому ток якоря подключенного генератора  . Это означает, что после включения генератор G2 останется работать в режиме холостого хода.
. Это означает, что после включения генератор G2 останется работать в режиме холостого хода.
При нарушении 1-го условия положительный вывод генератора G2 соединяется с отрицательной шиной, а отрицательный зажим - с положительной (рис. 15.1, в). При этом в цепи обмоток якорей генераторов ЭДС Ег и напряжение Uc действуют согласно, вследствие чего в указанной цепи возникнет результирующая ЭДС
 .Под действием этой ЭДС через обмотки якорей, имеющие небольшое сопротивление, потечет ток КЗ.
.Под действием этой ЭДС через обмотки якорей, имеющие небольшое сопротивление, потечет ток КЗ.
Соответствие полярности зажимов генератора и полярности шин обеспечивается при монтаже генератора во время постройки судна и в дальнейшем не проверяется.
Последствия нарушения 2-го условия зависят от соотношения ЭДС генератора и напряжения на шинах. При Ег > Uc ток якоря подключенного генератора  . Это означает, что включенный генератор перейдет из режима холостого хода в генераторный и примет на себя часть нагрузки работающего генератора. Включение на шины сопровождается толчком на валу генератора тормозного характера.
. Это означает, что включенный генератор перейдет из режима холостого хода в генераторный и примет на себя часть нагрузки работающего генератора. Включение на шины сопровождается толчком на валу генератора тормозного характера.
При Ег < Uc ток якоря генератора  . Это означает, что после включения генератор станет работать в двигательном режиме и создаст дополнительную нагрузку на работающий генератор. Электромагнитный момент генератора совпадает по направлению с моментом ПД, который вследствие этого может пойти "вразнос". Выполнение 2-го условия проверяется при помощи вольтметра, поочередно подключаемого к шинам и выводам генератора.
. Это означает, что после включения генератор станет работать в двигательном режиме и создаст дополнительную нагрузку на работающий генератор. Электромагнитный момент генератора совпадает по направлению с моментом ПД, который вследствие этого может пойти "вразнос". Выполнение 2-го условия проверяется при помощи вольтметра, поочередно подключаемого к шинам и выводам генератора.
Включение генератора на шины проводится в следующем порядке:
- генератор G2 приводится во вращение с номинальной частотой;
- при помощи регулировочного реостата R 2 устанавливают на зажимах генератора ЭДС Ег < Uc;
- подключают генератор на шины при помощи автоматического выключателя QF2.
После включения на шины генератор G2 нагружают, распределяя нагрузку между генераторами пропорционально номинальной мощности каждого из них.
Перевод и распределение нагрузки. Воздействуя на регуляторы возбуждения генераторов Rрг1 и Rрг2 в цепях параллельных обмоток возбуждения L2, осуществляют распределение нагрузки. При этом увеличивают ток возбуждения у генератора G2 и уменьшают у генератора G1. Такое одновременное и противоположное по характеру изменение токов возбуждения не только обеспечивает распределение нагрузки, но позволяет сохранить постоянство напряжения на шинах.
Для обеспечения устойчивой параллельной работы генераторов смешанного возбуждения последовательные обмотки L1 соединяют параллельно при помощи уравнительной шины УШ. Если ЭДС одного из генераторов возрастет (например, вследствие увеличения частоты вращения ПД), то увеличится ток нагрузки этого генератора. Часть этого тока пойдет по последовательной обмотке другого генератора. Магнитный поток этого генератора возрастет, его ЭДС также увеличится, и поэтому увеличится его ток нагрузки. В результате нагрузка автоматически распределится между генераторами пропорционально номинальной мощности каждого из них.
При обрыве уравнительного провода случайное увеличение ЭДС любого генератора приведет к увеличению его тока нагрузки. Этот ток, протекая по последовательной обмотке, еще больше увеличит ЭДС этого генератора, что, в свою очередь, приведет к дальнейшему увеличению тока нагрузки. Второй генератор при этом будет разгружаться. Из приведенного примера следует, что устойчивая параллельная работа генераторов смешанного возбуждения без уравнительного провода невозможна.
5. Особливості розробки прикладного програмного забезпечення мікропроцесорних систем.
При проектировании МК-систем, прежде всего возникает необходимость решения задачи об оптимальном (по ряду критериев) распределении функций между аппаратурными средствами и программным обеспечением.
При этом в самом общем случае необходимо исходить из того, что использование специализированных интерфейсных БИС упрощает разработку и обеспечивает высокое быстродействие системы в целом, но сопряжено с увеличением стоимости, объёма и потребляемой мощности. Больший удельный вес программного обеспечения позволяет сократить число компонентов и системы и стоимость её аппаратурных средств, но это приводит к снижению быстродействия и увеличению затрат и сроков разработки и отладки прикладных программ. Решение о выборе того или иного варианта распределения функций между аппаратурными и программными средствами системы принимается в зависимости от тиражности изделия, ограничений по стоимости, объёму, потребляемой мощности и быстродействию изделия. Попутно отметим, что время жизни изделия, в котором большая часть функций реализованы в программном обеспечении, многократно возрастает за счет того, что срок "морального старения" изделия может быть существенно отодвинут.
Довольно распространенная практика работы "тандемом", когда над разработкой прикладных программ для МК совместно работают профессиональный программист и непрограммирующий профессионал, т.е. специалист, владеющий "тайнами ремесла" в конкретной предметной области, имеет серьёзным недостатком то, что при попытках изложить программисту смысл прикладной задачи этот смысл зачастую ускользает. В результате такой практики формализуются и программируются наиболее очевидные, грубо говоря – тривиальные, прикладные задачи, а наиболее профессионально интересные остаются вне пределов досягаемости. Видимо, это объясняется тем, что время, необходимое на формализацию профессиональных знаний при работе "тандемом", нередко составляет до 70% всего времени, требующегося для получения законченного микроконтроллерного изделия.
Появление микропроцессорных и микроконтроллерных средств привело к продолжающемуся процессу перемещения основного объёма затрат на проектирование контроллеров из сферы разработки аппаратурных средств в сферу разработки программного обеспечения.
Получает распространение ориентация на разработку прикладных программ для МК-систем силами программирующих профессионалов потому, что в условиях быстро дешевеющей памяти экономят уже не память МК-системы, а время разработчика программного обеспечения, т.е. сокращают сроки разработки изделия. Вследствие этого прикладные программы, созданные программирующим профессионалом, с точки зрения профессионального программиста зачастую выглядят неуклюжими и неизящными. Но зато они обладают одним общим достоинством – они действительно работают в контроллерах, чего нельзя сказать о девяти из каждых десяти изящных программ, созданных профессиональным программистом, не могущим (по определению) быть профессионалом и в каждой конкретной предметной области знаний.
Билет 3
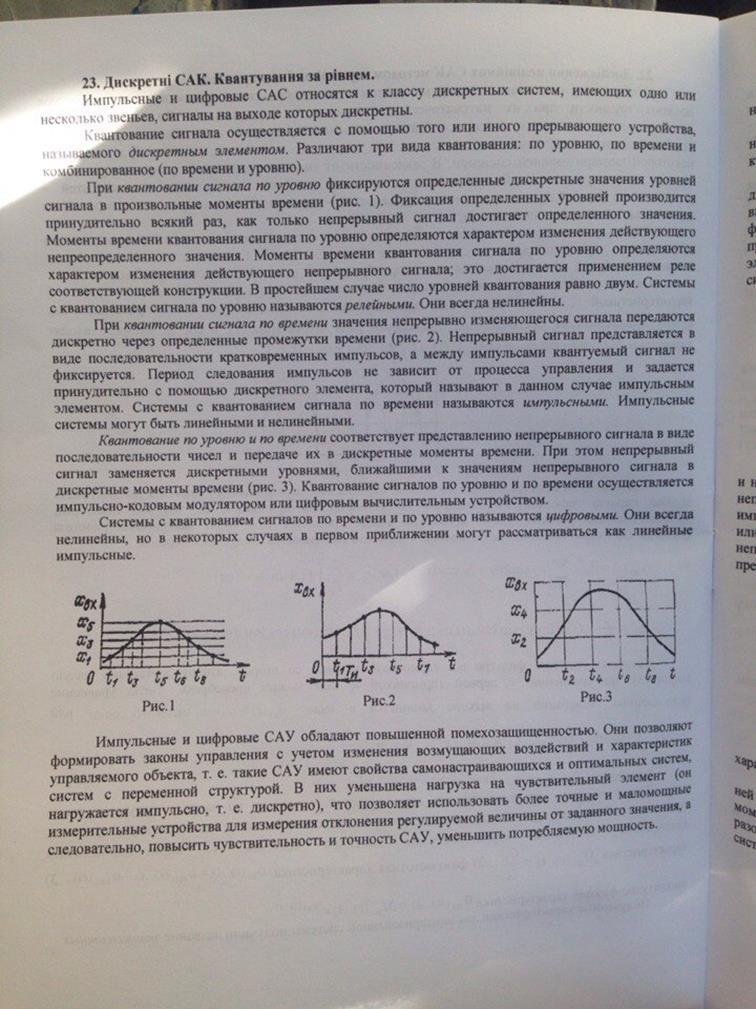
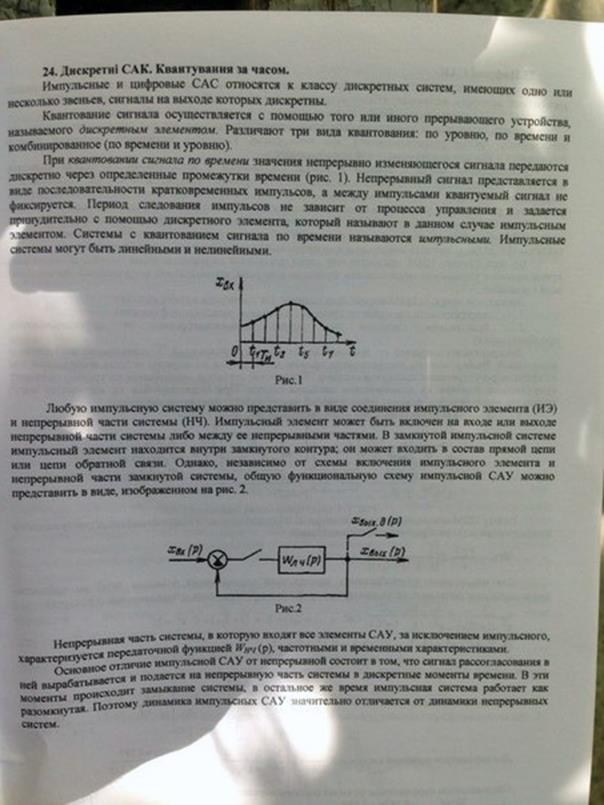
1 Дискретні САК. Квантування за часом.
2 Засоби регулювання кутової швидкості електродвигунів.
Винахід відноситься до області електричного транспорту, зокрема до способів і пристроїв регулювання швидкості електрорухомого складу з імпульсним регулюванням.
Відомий спосіб регулювання швидкості тягових двигунів, при якому шунтують резисторами їх обмотки збудження (див. Б.П.Петров, А.Д.Степанов. Електричне обладнання та автоматизація електричного рухомого складу, вид. 2-е перероб, і дод., М. - Л., Госенергоіздат, 1963, 304 С. на с 50-51).
При цьому способі регулювання на початку перехідного процесу відбувається різке збільшення струму в ланцюзі якоря двигуна, що призводить до поштовхів сили тяги і може викликати порушення комутації тягових двигунів.
Найбільш близьким до пропонованого технічного рішення є спосіб регулювання швидкості тягових двигунів, при якому шунтують обмотки збудження тягових двигунів резисторами, причому послідовно з шунтувальним резистором включають індуктивний шунт (див. Б.А.Тихменев, Л.М.Трахтман. Рухомий склад електрифікованих залізниць. Теорія роботи електрообладнання. Електричні схеми і апарати, М.; Транспорт, 1980. - 471С. на с.135-136).
Цей спосіб регулювання, хоча і покращує перехольше, чим краще якість перехідних процесів.
Завданням винаходу є зменшення поштовхів сили тяги і зниження масогабаритних показників регулювального обладнання електровоза.
Поставлена задача вирішується тим, що у відомому способі регулювання швидкості тягових двигунів електровозів постійного струму, при якому обмотки збудження тягових двигунів шунтують резисторами, послідовно з кожним тяговим двигуном або групою послідовно включених тягових двигунів включають імпульсний перетворювач і збільшують коефіцієнт заповнення перетворювача до значення, рівного одиниці. Потім вимірюють струм якоря тягових двигунів, у залежності моменту тягового двигуна від струму якоря і значенням коефіцієнта ослаблення поля, рівного відношенню величин струму збудження і струму якоря, визначають значення моменту тягового двигуна, за цим значенням моменту і залежності моменту тягового двигуна від струму якоря для нового значення коефіцієнта ослаблення поля визначають значення струму якоря, обчислюють значення струму збудження тягового двигуна після шунтировки, помноживши отримане значення струму якоря на нове значення коефіцієнта ослаблени�струму, вводять значення швидкості обертання двигуна ω, обчислюють значення ерс двигуна за формулою
Е=сФω,
де Е - ерс двигуна;
Ф - магнітний потік двигуна;
ω - частота обертання двигуна,
обчислюють нове значення коефіцієнта заповнення імпульсного перетворювача за формулою

де rЯIЯі rВ, IВ- опору і струми якоря і збудження відповідно;
U - напруга на якорі двигуна,
шунтують обмотки збудження тягових двигунів резисторами і подають імпульси управління на імпульсні перетворювачі, забезпечуючи нове значення коефіцієнта заповнення імпульсних перетворювачів γn+1.
Даний спосіб регулювання швидкості тягових двигунів дозволяє збільшувати швидкість тягових двигунів без поштовхів сили тяги, тому момент тягових двигунів при ослабленні поля залишається постійним, що забезпечується новим значенням γn+1коефіцієнта заповнення імпульсного перетворювача.
На фіг.1 представлений алгоритм реалізації способу регулювання, на фіг.2 - електромеханічні характеристики тягового двигуна постійного струму ДТК-800К.
Спосіб можеттних сигналів), наприклад, контролером M167-1С (див. каталог продукції "Бортова промислова електроніка" АТ "Каскад", 105037 Москва, Ізмайлівська пл.7).
При надходженні команди на ослаблення магнітного потоку двигунів контролер працює у відповідності з алгоритмом на фіг.1: збільшують ширину імпульсів керування імпульсними перетворювачами, доводячи коефіцієнт заповнення у імпульсних перетворювачів до значення 1 (блоки 2, 3). Потім вводять значення струму якоря двигунів IЯп(блок 4), визначають за електромеханічним характеристиками (фіг.2) для поточних значень коефіцієнта ослаблення поля βnі струму якоря IЯпзначення моменту двигуна (блок 5), за значенням моменту і залежності М (IЯп) для нового значення коефіцієнта ослаблення поля βn+1визначають необхідну для створення того ж моменту значення струму якоря IЯп+1(блок 6), обчислюють нове значення струму збудження IВп+1=βn+1IЯп+1(блок 7). По кривій намагнічування двигуна і значенням струму збудження визначають значення магнітного потоку двигуна Ф (блоку 8), вводять значення швидкості обертання двигуна ω (блок 9), обчислюють значення ерс двигуна (блок 10) і нове значення коэффиц�2) і реалізують обчислений коефіцієнт заповнення імпульсних перетворювачів γn+1(блок 13).
В якості прикладу наводиться визначення коефіцієнта заповнення імпульсних перетворювачів після ослаблення поля для електровоза постійного струму з двигунами ДТК-800К.
Ослаблення поля відбувається при переході з роботи на природній характеристиці двигуна з повним полем (β=1) на характеристику, що відповідає першій позиції ослаблення поля з β=0,8.
Напруга на двигуні U=1500 В; струм якоря IЯп=565 А; швидкість обертання n=945 об/хв
Опору обмотки якоря rЯ=0,0774 Ом, обмотки збудження rB=0,0226 Ом.
При β=1, IЯп=565 А визначаємо за характеристикою М (IЯ) момент двигуна М=8086 Нм. За цим значенням моменту для β=0,8 визначають нове значення струму якоря IЯп+1=600 А і нове значення струму збудження IBn+1=0,8×600=480 А. Для струму збудження 480 А за характеристикою  знаходять E=1,44; Е=1,44n=1,44×945=1361 Ст.
знаходять E=1,44; Е=1,44n=1,44×945=1361 Ст.
Тоді 
Регулювання швидкості за пропонованим способом дозволяє здійснювати регулювання без поштовхів сили тяги і без застосування індуктивних шунтів.
Спосіб регулювання швидкості тягових двигунів електровозів постійного струму сторами, відрізняється тим, що послідовно з кожним тяговим двигуном або групою послідовно включених двигунів включають імпульсний перетворювач, що збільшують коефіцієнт заповнення перетворювача

де t - час проводить стану імпульсного перетворювача;
Т - період перетворення,
при значенні=1, вимірюють струм якоря тягових двигунів, у залежності моменту тягового двигуна від струму якоря і значенням коефіцієнта ослаблення поля, рівного відношенню величин струму збудження і струму якоря, визначають значення моменту тягового двигуна, за цим значенням моменту і залежності моменту тягового двигуна від струму якоря для нового значення коефіцієнта ослаблення поля визначають значення струму якоря, визначають значення струму збудження тягового двигуна після шунтировки, помноживши отримане значення струму якоря на нове значення коефіцієнта ослаблення поля, по значенням струму збудження і кривої намагнічування двигуна визначають його значення магнітного потоку, вводять значення швидкості обертання двигуна ω, визначають значення ерс двигуна за формулою
Е=сФω,
де Е - е�еделяют нове значення коефіцієнта заповнення імпульсного перетворювача за формулою

де rЯ, IЯі rB, IB- опору і струми якоря і збудження відповідно;
U - напруга на якорі двигуна, шунтують обмотки збудження тягових двигунів резисторами і подають імпульси управління на імпульсні перетворювачі, забезпечуючи нове значення коефіцієнта заповнення імпульсних перетворювачів γn+1.
3 Технічна експлуатація якірно-швартовних устроїв. Підготовка до дії, травлення і вибирання якорів. Технічне використання і обслуговування ЯШУ.








