 2015-07-14
2015-07-14 3582
3582Ввод аналоговых сигналов в компьютер. Функциональные компоненты входного и выходного интерфейсов компьютера показаны на рисунке 9.8.
Сигнал, выработанный датчиком, должен быть отфильтрован от всех посторонних частот до того, как он будет обработан компьютером. В частности, необходимо устранить высокочастотный шум, который обычно наводится в кабеле при передаче сигнала. Отфильтрованные измерительные сигналы собираются в мультиплексоре. Это устройство, которое имеет несколько входов и один выход. Основное назначение мультиплексора — уменьшить общую стоимость системы за счет применения только одного устройства обработки (в данном случае — управляющего компьютера), которые обычно существенно дороже мультиплексора для всех входных сигналов. Преобразование аналогового сигнала в цифровой происходит в аналого-цифровом преобразователе (АЦП). Схема выборки и хранения запоминает мгновенные значения одного сигнала в заранее установленные моменты времени и удерживает его постоянным на выходе в течение интервала дискретизации. Перед дальнейшей обработкой в компьютере значение сигнала измерительной информации необходимо дополнительно проверить, чтобы удостовериться в том, что оно приемлемо и имеет смысл в контексте физического процесса.
Рисунок 9.8 - Основа структуры аналоговых и цифровых регуляторов
Цифровая обработка сигналов. Теорема Котельникова (Шеннона). Ниже будет сформулирована и доказана теорема Котельникова (теорема отсчётов) - основополагающая теорема для систем цифровой обработки сигналов, телекоммуникаций, а также теории связи. Теорема была сформулирована и доказана советским академиком В. А. Котельниковом в 30-х годах 20 века. Суть теоремы состоит в том, что вместо передачи непрерывного аналогового сигнала можно передавать соответствующий ему дискретный сигнал.
Формулировка теоремы: непрерывный сигнал, спектр которого не содержит частот больших fm может быть однозначно представлен своими мгновенными значениями (выборками), разделёнными одинаковыми интервалами времени, длина которых не должна превышать 1/2fm.
Другими словами период дискретизации должен хотя бы в два раза меньше периода наивысшей частотной составляющей спектра непрерывного сигнала, т.е. на каждый период наивысшей частотной составляющей должно приходиться по крайней мере два отсчёта (выборки). Таким образом, частота следования отсчётов должна, по крайней мере, в два раза превышать наивысшую частоту в спектре непрерывного сигнала. Полученный дискретный сигнал может быть передан по каким-либо линиям связи и из него фильтром нижних частот на стороне приёмника может быть однозначно восстановлен исходный аналоговый сигнал.
С другой стороны, непрерывный сигнал может иметь бесконечный спектр частот, но так как гармоники этого сигнала могут монотонно уменьшаться по амплитуде при увеличении номера гармоники, то с некоторой степенью точности можно считать спектр такого сигнала ограниченным.
Точность воспроизведения непрерывного сигнала во многом определяется характеристиками фильтра нижних частот и не оказывает влияния на корректность теоремы Котельникова в данном случае. Также, точность воспроизведения непрерывного сигнала определяется количеством уровней квантования в процессе получения отсчётов. Однако, если выбрать количество уровней квантования в соответствии с динамическим диапазоном и чувствительностью конкретной системы, то точность воспроизведения непрерывного сигнала не будет ухудшаться процессом получения отсчётов. Это утверждение, в частности, может быть до определённой степени справедливым, когда уровень шумов, присутствующий в исходном сигнале больше шага квантования. В этом случае не имеет смысла увеличивать количество уровней квантования, так как к повышению точности получения отсчётов это не приведёт.
Теорема Котельникова определяет также, что в непрерывном сигнале и соответствующем ему дискретном сигнале, полученном по приведённым выше правилам, содержится одинаковая информация, поэтому представление одного из этих двух сигналов другим является взаимно-однозначным.
Доказательство теоремы начнём с рассмотрения абстрактного вспомогательного непрерывного сигнала, представленного бесконечной последовательностью импульсов с некоторым периодом повторения (рисунок 9.9). Исследуемый непрерывный сигнал и его спектр показан на рисунке 9.10. Цель введения вспомогательного сигнала: показать, что и в нём после некоторых преобразований и в дискретном сигнале, полученном в соответствии с теоремой Котельникова, содержится одинаковая информация.
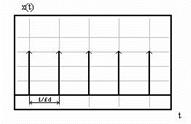
Рисунок 9.9 – Вспомогательный сигнал
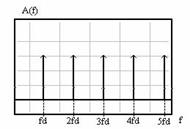
Рисунок 9.10 – Спектр вспомогательного сигнала
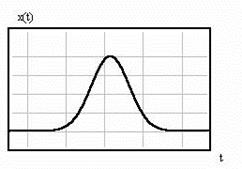

Рисунок 9.11 – Вспомогательный сигнал
Вспомогательный сигнал имеет следующие характеристики:
1) ширина каждого импульса бесконечно мала;
2) импульсы имеют единичную амплитуду;
3) спектр сигнала подобен самому сигналу (рисунок 9.9).
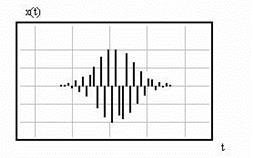
Рисунок 9.12 – Преобразованный сигнал
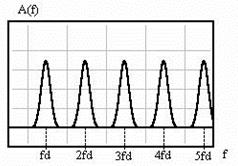
Рисунок 2.13 – Спектр преобразованного сигнала
Теперь умножим такой непрерывный сигнал на исследуемый непрерывный сигнал. Результат подобного преобразования показан на рисунке 9.13. Рассмотрим спектр получившегося сигнала. Из теории операционного исчисления известно, что изображение произведения двух оригиналов функций равно свёртке их изображений и наоборот. Данное утверждение можно доказать, используя формулу свёртки и преобразование Лапласа, применённое к двум данным функциям. Пусть исследуемый сигнал имеет спектр, вид которого показан на рисунке 2. Видно, что в этом спектре наивысшей частотной составляющей является 0.3 fd, где fd - период дискретизации получаемого дискретного сигнала и, соответственно, период следования импульсов во вспомогательном сигнале. Таким образом, спектр получаемого непрерывного сигнала представляет собой свёртку спектров исследуемого непрерывного сигнала и вспомогательного сигнала. Часть спектра полученного сигнала, находящаяся справа от момента появления импульса в спектре вспомогательного сигнала соответствует положительным частотам спектра исследуемого сигнала, а часть спектра полученного сигнала, находящаяся слева - отрицательным частотам. На полученном графике видно, что происходит дублирование спектров исследуемого сигнала в тех местах, где присутствуют импульсы на спектре вспомогательного сигнала. Причем, если ширина ненулевой области спектра исследуемого сигнала не превышает половины периода следования импульсов на спектре вспомогательного сигнала, то каждая продублированная часть спектра исследуемого сигнала располагается «отдельно» на спектре полученного сигнала. Если бы это было не так, т. е. ширина спектра исследуемого сигнала превышала бы половину периода следования импульсов, то в спектре полученного сигнала продублированные части спектра исследуемого сигнала «налезали» бы друг на друга. В таком случае происходит искажение частот спектра и дальнейшее восстановление непрерывного сигнала из дискретного становится невозможным. Характер искажений частот спектра в общем случае показан на рисунке 9.14.
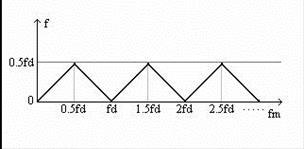
Рисунок 9.14 – Искажение спектра
Так как доказана теорема отсчётов для вспомогательного сигнала, а вспомогательный сигнал содержит абсолютно такую же информацию, как и получаемый дискретный, то теорема также справедлива и для дискретного сигнала. Что и требовалось доказать.
Далее, для восстановления исходного непрерывного сигнала из сигнала, полученного перемножением исходного и вспомогательного сигналов требуется пропустить полученный сигнал через фильтр нижних частот, который подавит все частоты, выше fm. Однако такой подход требует пояснения для дискретного сигнала. Дело в том, что на выходе ЦАП формируется не последовательность импульсов бесконечно малой ширины, а ступенчатый сигнал. Это объясняется самим принципом работы ЦАП. Если исследовать спектр полученного на выходе ЦАП сигнала, то окажется, что он довольно сильно искажён по сравнению со спектром полученного сигнала в доказательстве теоремы. Это можно объяснить тем, что сигнал на выходе ЦАП представляет собой свёртку полученного в доказательстве теоремы сигнала и сигнала в виде прямоугольного импульса длительностью, соответствующей длительности периода дискретизации. Опять же, по теории операционного исчисления, изображение свёртки оригиналов двух функций равно произведению их изображений.
Получаемый на выходе ЦАП сигнал и его спектр показаны на рисунках 9.15 и 9.16.
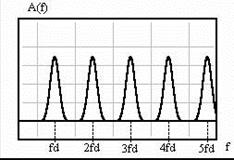
Рисунок 9.15 – Спектр преобразованного сигнала
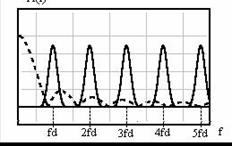
Рисунок 9.16 –Сигнал на выходе ЦАП
Пунктиром отмечен спектр прямоугольного импульса (см. рисунок 9.16). Дублированные части спектра показаны не перемноженными на функцию вида sin(x)/x. Спектр любого прямоугольного импульса задаётся функцией, подобной sin(x)/x. Для восстановления непрерывного исходного сигнала в таком случае нужно рассчитать импульсную характеристику фильтра нижних частот таким образом, чтобы после применения этого фильтра в спектре полученного сигнала производилась ещё и операция деления на соответствующим образом подобранную функцию вида sin(x)/x.
Так как в практических случаях не удаётся достичь точной рассчитанной импульсной характеристики фильтра, может возникнуть скат спектра импульсной характеристики в области частоты среза фильтра. Ширина ската зависит от типа используемого аналогового фильтра. Например, при использовании фильтра Бесселя, ширина ската довольно значительна, а при использовании фильтра Чебышева ширина ската гораздо меньше, но фильтр Чебышева имеет ряд других недостатков, которые обсуждаются в главе «Применение цифровых фильтров». Из-за ската в области частоты среза, некоторая часть спектра в окрестностях частоты среза является неиспользуемой и тогда используют фильтр с частотой среза, превышающей fm на ширину ската.
В заключение следует отметить, что рассмотренный при доказательстве теоремы Котельникова вспомогательный сигнал является чисто абстрактным и в природе существовать не может, так как невозможно получить бесконечно малую ширину импульса. Однако, можно сделать некоторое упрощение, основанное на следующем факте. Любая линейная система имеет конечное быстродействие, т. е. работает в конечном временном интервале. Если это электрическая схема, то быстродействие, как правило, определяется величинами ёмкостей, входящих в состав схемы. Если на вход такой системы подать импульс, имеющий единичную амплитуду и длина которого будет намного меньше нижней границы временного интервала работы схемы, то этот импульс будет воспринят так же как и идеальный (т. е. имеющий бесконечно малую ширину и единичную площадь). Таким образом, в практических случаях существует приближение вспомогательного сигнала, использованного при доказательстве теоремы.
Мультиплексирование и аналого-цифровое преобразование измерительной информации. Для компьютерной обработки дискретные аналоговые значения измерительного сигнала необходимо представить в цифровой форме, т. е. выполнить аналого-цифровое (АЦ, Analog-Digital — A/D) преобразование. Соответствующее устройство называется аналого-цифровым преобразователем (АЦП, Analog-Digital Converter, A/D converter — ADC). АЦП генерирует двоичное слово — цифровой выход — на основе аналогового сигнала. Существуют аппаратные АЦП, выполненные, например, в виде платы расширения компьютера. Такие АЦП могут работать в соответствии с различными принципами; два широко распространенных метода — параллельное сравнение и пошаговое приближение (аппроксимация).
Алгоритмы АЦП и ЦАП. Информация от датчиков с унифицированными выходными сигналами (токовым, частотным и др.) поступает на вход аналого-цифрового преобразователя контроллера, где преобразуется из аналоговой формы в цифровую (аналого-цифровой), точнее, в двоичный код с разрядностью, определяемой разрядностью АЦП. Происходящее при этом преобразование называется квантованием входного сигнала по уровню и выражается в математическом виде так
 ,(9.4)
,(9.4)
где Хц – значение сигнала, выраженное в кодах АЦП; Xа – значение аналогового сигнала, поступающего на вход АЦП на каждом такте опроса измерительного канала; q – шаг аналого-цифрового преобразователя; E(entier) – целая часть числа, заключенного в скобки.
Заметим, что погрешность от квантования аналогового сигнала по уровню не превышает 0,5 от его текущего значения.
Выходной сигнал в цифро-аналоговом преобразователе контроллера преобразуется в аналоговую (цифро-аналоговую) или импульсную (цифро-импульсную) форму. Аналоговые сигналы (0-5, 4-20 mA и др.) обычно поступают для регистрации на вторичные приборы или электропневмопреобразователи, на пневматические исполнительные механизмы регулирующих органов. Импульсные сигналы используются для управления электрическими исполнительными механизмами постоянной скорости. У них в качестве привода применяются электродвигатели, а интенсивность управляющих воздействий (при постоянной скорости вращения вала электродвигателя) определяется изменяющейся скважностью импульсов в блоках выдачи управляющих сигналов контроллеров.
Алгоритмическое обеспечение управления процессом в реальном времени с использованием управляющего компьютера.
Алгоритмическое обеспечение – совокупность взаимосвязанных алгоритмов. Часть вопросов, близких к данной теме рассмотрены в лекции №2. Множество алгоритмов АСУТП делятся на 6 групп:
1. алгоритмы первичной обработки информации (фильтрация, учет нелинейности характеристики);
2. алгоритмы определения показателей процесса (алгоритмы вторичной обработки информации), определение интегральных и средних значений, скорости, прогнозирования и т.д.;
3. алгоритмы контроля;
4. алгоритмы цифрового регулирования и оптимального управления;
5. алгоритмы логического управления;
6. алгоритмы расчета технико-экономических показателей.
Рассмотрим алгоритмы проверки достоверности информации, применяемые в цифровых системах управления. Недостоверность информации появляется при отказах информационно-измерительных каналов. Отказы бывают двух видов: полные и частичные. Полный отказ наступает при выходе из строя измерительного преобразователя, или при повреждении линии связи. При частичном отказе технические средства сохраняют работоспособность, однако погрешность измерения превышает допустимое значение.
Алгоритмы, позволяющие обнаруживать полные отказы:
1) алгоритм допускового контроля параметра: проверка условия - Ximin ≤ Xi ≤ Ximax
Ximin – минимально возможное значение i-го параметра;
Ximax – максимально возможное значение i-го параметра.
Если условие не выполняется, то информация недостоверная. В этом случае используют достоверную информацию, полученную в предшествующий момент времени, либо используют среднее значение i-го параметра.
2) Алгоритм основан на определении скорости изменения i-го параметра и проверки условия:
A ≤ Xi ≤ B
Хi=dXi(t)/dt
dXi(t)/dt=(Xi(k)-Xi(k-1))/T0, где T – период опроса, T=dt
3) Алгоритм аппаратного резервирования – алгоритм контроля информации, с помощью которого выявляются частичные отказы, основанные на использовании информационной избыточности. Избыточность может быть получена путем резервирования информационно – измерительных каналов (аппаратная избыточность), или путем определения некоторых параметров с помощью прямого измерения, так и путем расчетов через другие параметры.
Аппаратная избыточность – признак отказа, нарушение условия - | Xi - Xср| < C, где
Хср – это среднее значение по всем измерительным преобразованием;
Xi – значение, полученное от i измерительного преобразования;
С – наибольшее допустимое значение модуля разности (2-3 от средне квадратичной погрешности изменения преобразования).
4) Уравнение материального баланса имеет вид: f(x1, x2, ….xn)=0. Уравнение выполняется лишь в том случае, если значения параметров x1, x2, ….xn соответствуют истинным значениям. Если параметры изменяются с погрешностью  , имеем
, имеем  . При подстановке значений
. При подстановке значений  , получим:
, получим:
 . (9.5)
. (9.5)
Если  , то информация считается недостоверной.
, то информация считается недостоверной.
Алгоритмы учёта динамических связей между параметрами. Наличие инерционного датчика может существенно исказить частотный состав измеряемого сигнала, например, при измерении температуры в печах применяют массивные чехлы для защиты термопар от механических повреждений, что вызывает значительную динамическую погрешность.
Если принять статический коэффициент передачи инерционного датчика равный единице, то есть  при
при  , то необходимо учитывать следующую связь:
, то необходимо учитывать следующую связь:  , т.е. в текущий момент времени на выходе датчика формируется сигнал несущий информацию о значении параметра в предшествующий момент времени, т.е. в момент времени
, т.е. в текущий момент времени на выходе датчика формируется сигнал несущий информацию о значении параметра в предшествующий момент времени, т.е. в момент времени  .
.
Алгоритмы вторичной обработки информации. К основным операциям вторичной обработки относят:
· определение интегральных и средних значений величин и показателей;
· определение скорости изменения величины и показателей;
· определение величин и показателей, неизмеряемых прямым методом (косвенное измерение);
· прогнозирование значений величин;
· определение статических характеристик, величин и показателей.
Применяются для управления и анализа работы. Большое значение имеет определение суммарных количеств вещества или энергии, получаемых в производстве за определенный интервал времени. Примерами являются расходы электроэнергии, топлива за час, смену, сутки и так далее. Этим же целям служит определение средних значений измеряемых величин, являющихся режимными показателями (среднее время, среднее давление и т.д.)
Рассмотрим методы дискретного интегрирования, непрерывно изменяющейся во времени измеряемой величины. Далее приведены численные методы интегрирования.
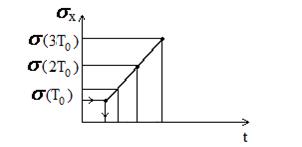
Метод прямоугольников (см. рисунок 9.17).Суть метода состоит в замене реализации x(t) её ступенчатой экстраполяцией за время t.
 , (9.6)
, (9.6)
 , где
, где  - период опроса датчика.
- период опроса датчика.
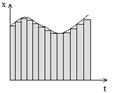
Рисунок 9.17 - Метод прямоугольников
В представленном виде алгоритм интегрирования используется редко, для его реализации требуется запоминать все значения  . На практике используется рекуррентная формула:
. На практике используется рекуррентная формула:
 ,
,  . (9.7)
. (9.7)
Метод трапеций (см. рисунок 9.18).Более точным является метод трапеции. Рекуррентная формула:
 . (9.8)
. (9.8)
Погрешность метода трапеции меньше погрешности метода прямоугольников на величину:
 .
.
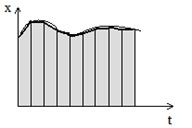
Рисунок 9.18 -Метод трапеций
Как показывают расчеты приблизительно на 10% уменьшается погрешность дискретного интегрирования при переходе от метода прямоугольника к методу трапеции при n>10, когда существеннее влияние на результат расчета оказывают кратные числа, следовательно, на практике в большинстве случаев используют метод прямоугольников, как более простой и экономичный.
Среднее значение определяется через интегральное:
 , где
, где
 - время интегрирования.
- время интегрирования.
Дифференцирование дискретно – измеряемых величин. Для анализа хода технологического процесса весьма важным является определение не только численных значений параметров, но и тенденция их применения в текущий момент времени (увеличивается параметр или уменьшается). В этом случаи необходимо определять скорость изменения параметра, то есть осуществлять дифференцирование.
Производная от ошибки необходимо определять и при реализации регулятора, например с ПД, ПИД звеньями.
Наиболее простой алгоритм дискретного дифференцирования основан на использовании следующей функции:  , где Т0 – период опроса датчика.
, где Т0 – период опроса датчика.
Алгоритмы прогнозирования значений величин и показателей. Для расчета прогнозируемых значения необходимо построить математическую модель временного ряда. В практике краткосрочного прогнозирования наибольшее распространение получили модель авторегрессии и полиномиальная модель. Модель авторегрессии имеет вид:
 , (9.9)
, (9.9)
где а – коэффициенты, р – порядок. Расчет прогнозируемых значений проводится по формуле:
 , (9.10)
, (9.10)
где  - измеренные или прогнозируемые значения временного ряда в моменты времени t=(n-k+l)To.
- измеренные или прогнозируемые значения временного ряда в моменты времени t=(n-k+l)To.
Данный алгоритм прост в реализации, но его недостатком является низкая точность, так как результаты а(к) не уточняются по результатам прогноза. Этого недостатка лишен метод полиномиальной модели:
 , (9.11)
, (9.11)
где n - номер текущего шага, l - число шагов прогноза.
Оценка параметров этой модели а уточняется по мере поступления каждого нового значения временного ряда. Для этих целей используется экспоненциальные средние различного порядка.
1 порядка: Z1(j)=γy(j)+(1-γ)Z1(j-1)
2 порядка: Z2(j)=γZ1(j)+(1-γ)Z2(j-2)
… …
r порядка: ZN(j)=γZr-1(j)+(1-γ)Zr(j-1), где  - параметр настройки прогнозирования.
- параметр настройки прогнозирования.
Выбор данного параметра основывается на следующих свойствах: если желательно чтобы прогноз базировался на последних значениях временного ряда, то следует выбирать значение , близкое к 1. Если необходимо учитывать и предыдущие значения временного ряда, то необходимо уменьшать.
Расчет коэффициентов осуществляется по формуле для модели 1 порядка:
 (9.12)
(9.12)
Расчет коэффициентов осуществляется по формуле для модели 2 порядка:
 (9.13)
(9.13)
Коэффициенты в полиномиальном законе рассчитываются через модели 1 и 2 порядка; модели высшего порядка применяются редко, т.к. качество прогноза растет незначительно.
Определение статистических показателей измеряемых величин. Знание статистических характеристик необходимо для оценки качества выпускаемой продукции и определения момента нарушения хода ТП. В этом случае меняются значения статистических характеристик измеряемых величин. Особенностью определения lfyys[ характеристик является использование рекуррентных формул.
Математическое ожидание (1 – не рекуррентная формула, 2 – рекуррентная формула)
 (9.14 – 9.15)
(9.14 – 9.15)
Дисперсия (1 – не рекуррентная формула, 2 – рекуррентная формула)
 (9.16 – 9.17)
(9.16 – 9.17)
Определение периода опроса датчиков измеряемых величин. Период опроса существенно влияет на точность контроля. Рассмотрим способ определения периода опроса, основанный на определении автокорреляционной функции.
Пусть задана среднеквадратичная погрешность  . Определение величины x(t). Требуется найти интервал времени T0 между замерами, при которых погрешность определение величины не превышало бы заданного значения. Методика основана на зависимости ошибки и автокорреляционной функции:
. Определение величины x(t). Требуется найти интервал времени T0 между замерами, при которых погрешность определение величины не превышало бы заданного значения. Методика основана на зависимости ошибки и автокорреляционной функции:
 , (9.18)
, (9.18)
где
 - автокорреляционная функция.
- автокорреляционная функция.
 , (9.19)
, (9.19)
где
n - объем выборки, по которой определяется автокорреляционная функция.
 ,
,  .
.
Сущность методики состоит в следующем:
1. Осуществляется съем данных с произвольным периодом опроса T0 (как можно меньше). Число точек опроса: 30-50. Полученные данные заносятся в таблицу:
| № | Время | Значение x | Отклонение за время | |||||
| T0 | 2T0 | 3T0 | ||||||
| x0 | - | - | - | - | - | - | ||
| T0 | x1 |  |  | - | - | - | - | |
| 2T0 | x2 |  |  |  |  | - | - | |
| 3T0 | x3 |  |  |  |  |  |  | |
| … | … | … | … | … | … | … | … | … |
| n | n T0 | xn |  |  |  |  |  |  |
| Значение ошибки |  |  |  |
 ;
;  ,
,  ,
,
где i – номер строки таблицы, k – номер столбца.
 .
.
2. Строится график зависимости ошибки от периода опроса.
3. По значению по графику определяется значение  .
.
Значение периодов опроса датчиков, используемых на практике.
· Расход: 0.1 – 2с.
· Уровень: ≈5с.
· Давление: 0.5 – 10с.
· Температура: 5 – 30с.
· Концентрация: ≈20с.
Выбор такта управления (периода опроса- Т0) в цифровых системах. Выбор такта управления является весьма важным этапом синтеза цифровой системы управления, т.к. от его значения существенно зависит качество системы управления. Чем меньше такт управления, тем выше качество САУ. Однако при очень малых тактах дальнейшее улучшение качества достигается лишь при существенном возрастании вычисленных затрат при управлении.
Выбор такта производится не только исходя из условий достижения требуемого качества. При этом учитываются следующие факторы:
· динамика объекта управления (ОУ);
· спектр возмущающих воздействий;
· динамика исполнительного устройства (ИУ);
· вычислительные затраты.
Динамика ОУ характеризуется постоянной времени объекта (ОУ). Для обеспечения эффективности управляющих воздействий принимают:
А) Т0=(0.1  1)Т, где Т – доминирующая постоянная времени ОУ, либо
1)Т, где Т – доминирующая постоянная времени ОУ, либо
Б) Т0=(6  15)tnn, где tnn – время переходного процесса;
15)tnn, где tnn – время переходного процесса;
В) Если выбор Т0 осуществляется с учетом частотных свойств ОУ, то
Т0<  ,
,
где  - граничная частота пропускания сигнала ОУ. Эта частота выбирается из условия: F(ωT)=0.1
- граничная частота пропускания сигнала ОУ. Эта частота выбирается из условия: F(ωT)=0.1  0.01
0.01
Рассматривается зависимость T0 от спектра возмущающих воздействий. Если возмущающее воздействие вплоть до частоты ω MAX необходимо отработать, то такт управления выбирается из условия Т0<  , что соответствует приведенной выше теореме Котельникова- Шеннона.
, что соответствует приведенной выше теореме Котельникова- Шеннона.
3) Необходимость учета динамики ИУ обусловлена следующим обстоятельством: если исполнительное устройство обладает значительной инерционностью, то не следует выбирать слишком маленький Т0, т.к. может оказаться, что предыдущий сигнал управления может оказаться неотработанным к моменту прихода следующего сигнала.
4) Для минимизации вычислительных затрат или стоимости каждого контура управления, такт управления следует выбирать как можно больше, но не стоит забывать что от него зависит качество системы управления.
Основная литература
1. Изерман Р. Цифровые системы управления. -М.: Мир, 1984.-541с
2. Автоматическое управление в химической промышленности: Учебник ВУЗов./Под ред. Е.Г.Дудникова. - ML: Химия, 1987. 168 с, ил.
3. Голубятников В.А., Шувалов В.В. Автоматизация производственных процессов в химической промышленности. - 2-е изд. перераб. и доп. -М.: Химия, 1985. -352с..Шувалов В.В.и др. Автоматизация производственных процессов в химической промышленности.-3-е изд. перераб. и доп. -М.: Химия, 1991, -478с.
4. Г.Олсон, Д.Пиани, Цифровые системы автоматизации и управления.- СПб.: Невский диалект, 2001. -557с.
Дополнительная литература
5. Автоматизация технологически процессов пищевых производств». Под редакцией профессора Е.Б. Карпина. – М. «Пищевая промышленность» 1997г
6. Плютто В.П. Практикум по теории автоматического управления химико - технологическими процессами. Цифровые системы. -М.: Химия, 1989, -168с.
7. An Introduction to Intelligent and Autonomous Control. Edited by Panos J. Antsaklis and Kevin M. Passino. Kluwer Academic Publishers, 1999, 427 pages

