2015-07-14
2015-07-14 799
799Більшість обчислювальних систем описуються моделлю, запропонованою В. М. Глушковим (рис. 2.16). Згідно моделі цифровий автомат (ЦА), як пристрій для автоматичної обробки цифрової інформації по заданих алгоритмах є сукупністю операційного автомата (OA) і автомата управління (АУ).
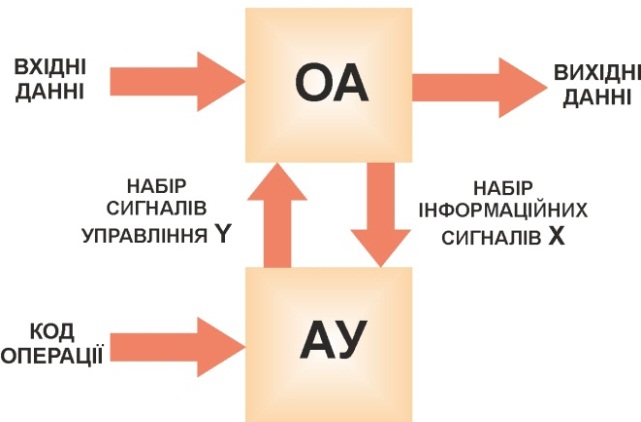
Рисунок 2.16 - Структура цифрового автомата
Операційний автомат служить для виконання власне набору необхідних операцій алгоритму. Автомат управління координує дії вузлів OA і задає послідовність дій з алгоритму залежно від умов, що також формуються OA, як логічні сигнал. АУ виробляє в деякій тимчасовій послідовності сигнали управління під дією яких у вузлах OA виконуються необхідні дії, наприклад, установка регістра в деякий стан, інвертування вмісту розрядів рахунок і т. д.
Робота автомата розбивається на такти (дискретні інтервали часу). Кожна така елементарна дія, що виконується в одному з вузлів OA протягом одного тактового періоду, називається мікрооперацією. Сукупність мікрооперацій, які можуть виконуватися в OA паралельно в одному такті, називається мікрокомандою. Послідовність мікрокоманд, що реалізовують алгоритм, називається мікропрограмою.
Таким чином, якщо в OA передбачається можливість виконання п різних мікрооперацій, то з АУ виходять п кіл управління кожна з яких відповідає певній мікрооперації. І якщо необхідно в OA виконати деяку мікрооперацію, досить з АУ по певному колу управління відповідному цій мікрооперації, подати відповідний сигнал.
Формування сигналів управління y1, y2..yn для виконання мікрокоманд може відбуватися залежно від стану вузлів ОА, що визначаються сигналами х1, x2.., хs, які подаються з відповідних виходів ОА на входи АУ. Сигнали управління y1, y2..yn можуть також залежати від зовнішніх сигналів xs+1., xL (рис. 2.17).
Для скорочення числа кіл управління, що виходять з АУ (у тих випадках, коли вони конструктивно виконується окремо від операційного), мікрокоманди можуть кодуватися.
Результати обробки, що виконані в ОА, знімаються з його виходів z1,z2,..zm.
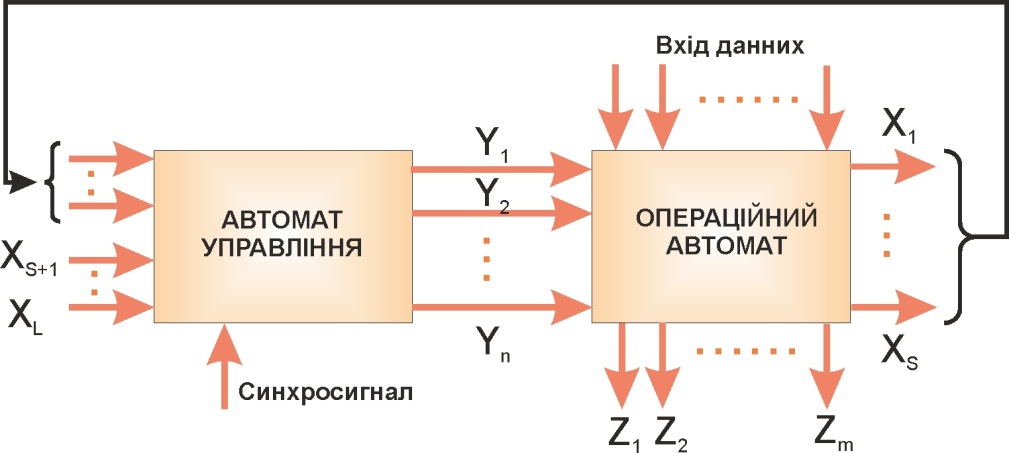
Рисунок 2.17 - Композиція операційного автомату та автомату управління
Внаслідок того, що АУ визначає мікропрограму, тобто які і в якій тимчасовій послідовності повинні виконуватися мікрооперації, він дістав назву мікропрограмного автомата.
Кінцевий автомат, що інтерпретує мікропрограму роботи дискретного пристрою, називається мікропрограмним автоматом.
Існує два принципово різних підходу до проектування мікропрограмного автомата: використання принципу схемної логіки (автомати з жорсткою логікою АУЖЛ) і використання принципу програмованої логіки (АУПЛ).
У першому випадку в процесі проектування підбирається деякий набір цифрових мікросхем і визначається така схема з'єднання їх виводів, яка забезпечує необхідне функціонування.
Пристрої, засновані на такому принципі схемної логіки, здатні забезпечувати найвищу швидкодію при заданому типі технології елементів. Недолік цього принципу побудови автомата полягає в трудності використання ВІС. Це пов'язано з тим, що при використанні схемного принципу кожен автомат, що розробляється, виявиться індивідуальним по схемній побудові і зажадає виготовлення індивідуального типу ВІС.
Інший підхід в проектуванні цифрових автоматів, заснований на використанні принципу програмованої логіки. Цей підхід припускає побудову з використанням однієї або декількох ВІС деякого універсального пристрою, в якому необхідне функціонування (тобто спеціалізація пристрою на виконання певних функцій) забезпечується занесенням в пам'ять пристрою певної програми (або мікропрограми). Залежно від введеної програми такий універсальний пристрій управління, здатний забезпечувати необхідне управління операційним автоматом при рішенні найрізноманітніших завдань.
Найвища швидкодія досягається в ЦА, в яких АУ будується з використанням принципу схемної логіки, а ОА виконується у вигляді пристрою, спеціалізованого для вирішення конкретного завдання.
Автомати з жорсткою логікою будуються на базі пам'яті станів, яка зазвичай реалізується сукупністю тригерів і комбінаційної схеми, яка управляє перемиканням тригерів (тобто - зміною станів) та формуванням вихідних сигналів ym залежно від вхідних сигналів хn і поточного стану Ql (рис. 2.18). Код поточного стану зберігається в тригерах. Схема жорстко реалізує закон функціонування автомата, звідки слідує назва автоматів цієї групи.
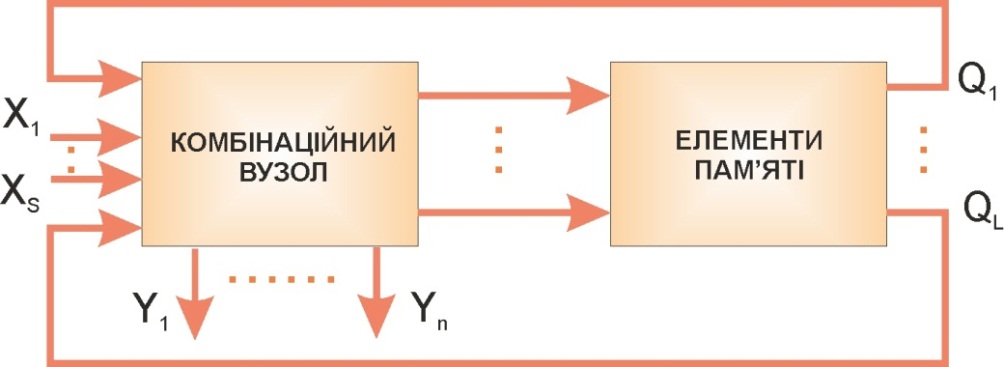
Рисунок 2.18 - Структурна схема автомата управління з жорсткою логікою
Для побудови обох типів автоматів, але передусім, АУЖЛ, використовується теорія абстрактних кінцевих автоматів (КА). Для побудови використовується дві базові моделі КА, функціонально аналогічні: автомат Мура і автомат Мілі.
Організація цих пристроїв заснована на принципі мікропрограмного управління, який полягає в наступному,:
1. Будь-яка операція, що реалізовується пристроєм, розглядається як складна дія, яка розділяється на послідовність елементарних дій над словами інформації. Ці елементарні дії називаються мікроопераціями. До мікрооперацій відносяться: передача інформації з одного регістра в іншій, узяття зворотного коду, зсув, підсумовування, інверсія, інкремент і/або декремент значення в лічильнику і так далі.
2. Для управління порядком дотримання мікрооперацій використовуються логічні умови, які залежно від значень слів, що перетворюються мікроопераціями, набувають значень 1 або 0.
3. Процес виконання операцій в пристрої описується у формі алгоритму, який представляється в термінах мікрооперацій та логічних умов і називається мікропрограмою. Мікропрограма визначає порядок перевірки значень логічних умов і дотримання мікрооперацій, необхідний для отримання необхідних результатів.
4. На основі мікропрограми визначається структура і порядок функціонування пристрою в часі.
Порядок виконання дій в часі задається операторною схемою алгоритму (мікропрограми), яка зазвичай представляється у вигляді граф - схеми алгоритму (ГСА).
ГСА визначає обчислювальний процес послідовно в часі, встановлюючи порядок перевірки логічних умов і порядок дотримання мікрооперацій.
Для побудови графа автомата виконується розмітка станів автомата на ГСА. Способи розмітки автоматів Мура і Мілі відрізняються.
Перехід від ГСА до графа автомата Мілі здійснюється в два етапи. На першому етапі виконується визначення числа станів шляхом розмітки та відмітки граф-схеми; на другому - визначення графа автомата.
Правила розмітки:
- Символом Q0 позначаємо вхід тієї вершини, що йде за початковим оператором в ГСА і вхід кінцевої вершини.
- Символами Ql, Q2..Qn - входи вершин, що йдуть за операторними вершинами
Якщо в результаті розмітки виявилось, що в одну і ту ж вершину граф-схеми входить декілька розмічених стрілок, то їм привласнюється один і той же символ.
Перехід від відмічених граф-схем до графа автомата здійснюється в наступному порядку:
- Вершинами графа зображуються усі стани автомата і усередині їх зображення записуються символи, тобто існуючі мітки на ГСА.
- На граф-схемі мікропрограми відшукується шлях між двома сусідніми станами. Шляхи відображуються дугами.
Кінцевий автомат, що інтерпретує мікропрограму роботи дискретного пристрою, називається мікропрограмним автоматом. Одну і ту ж ГСА можна інтерпретувати як автоматом Мілі, так і автоматом Мура.
Абстрактний синтез мікропрограмного автомата по ГСА здійснюється в два етапи:
1. Отримання відміченої ГСА.
2. Побудова графа автомата або таблиць переходів і виходів.