 2015-07-14
2015-07-14 927
927Початковою інформацією для першого етапу може служити словесний опис алгоритму функціонування автомата або аналіз часових діаграм його роботи. Результатом цього етапу повинно бути отримання формалізованого опису закону функціонування у вигляді таблиць переходів, графів переходів і т. д. Практичний досвід свідчить, що зручно задавати автомат за допомогою початкових таблиць переходів (ПТП), оскільки їх структура є найбільш простою.
ПТП характеризується тим, що в кожному її рядку є тільки один стійкий стан, а всі переходи між станами прості.
Приклад. Необхідно синтезувати автомат (цифровий пристрій), що пропускає імпульси прямокутної форми х0 якщо немає заборони (х1 = 0), і не пропускає, якщо заборона існує (х1 = 1). При цьому імпульси х0 не повинні спотворюватись незалежно від моменту появи сигналу заборони х1.
Розв'язання. Такий автомат має назву генератора із забороною. Для більш детального опису можна побудувати часові діаграми, які пояснюють його функціонування. Відповідні діаграми для вхідних і вихідних сигналів приведені на рис. 2.3.
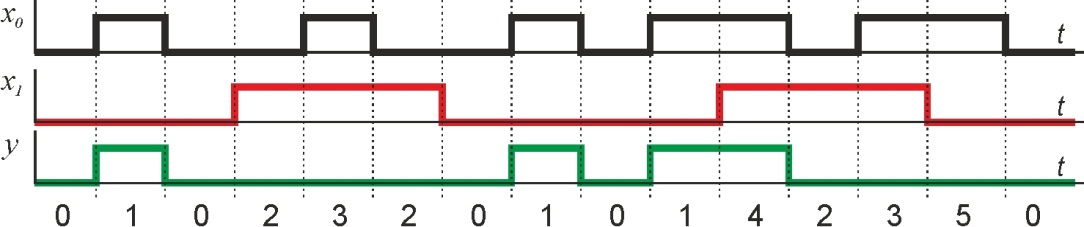
Рисунок 2.3 -Діаграми для вхідних і вихідних сигналів
На основі аналізу зміни вхідних і вихідних сигналів можна вводити стани автомата, які характеризуються станом входу (сигналами х0 та х1 з вхідного алфавіту X) і станом виходу Y (сигналом у).
Різноманітним комбінаціям вхідних та вихідних сигналів припишемо відповідні номери, які характеризують всі можливі стани автомата. За початковий оберемо стан Q00 = 0, який характеризується значеннями вхідних сигналів х1х0 = 00 і значенням вихідного сигналу y= 0. СтанQ00 = 0 є стійким, тобто таким, який не зміниться без дії вхідних сигналів. У таблиці ПТП (табл. 2.1), що будується, стійкі стани будемо виділяти дужками. Нестійкі стани автомата - це такі, які можуть змінюватися на стійкі без зміни вхідних сигналів. Такі стани в ПТП будемо позначати їх номерами без дужок.
Якщо на автомат, що перебуває у стійкому стані Q00, діятиме вхідний сигнал х1х0 = 01, то він перейде в новий, спочатку нестійкий стан, який потім перейде у стійкий Q1 = (1). Нестійкий стан відповідає ситуації, коли в результаті зміни вхідного сигналу X змінились сигнали збудження тригерів, але ще не змінився вихідний сигнал, тобто у залишився рівним нулю. По закінченні перехідних процесів автомат перейде у стійкий стан Q1 = (1), який характеризується вхідними сигналами х1х0 = 011 вихідним у = 1.
Переходу зі стійкого стану (0) в нестійкий 1 у ПТП відповідає переміщення в межах першого рядка з клітинки з координатами х1х0 = 00 у клітинку з координатами х1х0= 01. Вихідний сигнал при цьому залишається незмінним: y = 0.
Переходу з нестійкого стану 1 у стійкий стан (1) в ПТП відповідає переміщення в межах одного стовпця з координатами х1х0 = 01 з першого рядка до другого. Вихідний сигнал при цьому змінюється і набуває значення y = 1 (табл. 2.1).
Звідси маємо, що перехід з одного стійкого стану (0) в інший стійкий стан (1) відповідає двом фрагментам переходу: спочатку у межах рядка, а потім у межах стовпця.
З часової діаграми, наведеної на рис. 2.3, видно, що стійкий стан (1) за умови х1х0 = 00 змінюється на стан (0), а потім під дією сигналу х1х0 = 10 переходить у стан (2), і т.д.
Номери станів на часовій діаграмі зображають так, щоб кожна змінювана ситуація в сигналах X, Y мала свій номер і щоб були враховані всі зовнішньо однакові ситуації, які вимагають спеціального запам'ятовування. Наприклад, якщо автомат реагує на третій імпульс, то кожен з трьох імпульсів і кожну з двох пауз необхідно позначити своїм номером. Аналіз всієї часової діаграми дозволяє заповнити ПТП (див. табл. 2.2), але не повністю - частина клітинок залишається вільною. Наприклад, у першому рядку ПТП залишилась незаповненою клітинка з X = 11. Оскільки стан Q = 0 є стійким при X = 00, то перехід в новий стан, що відповідає X = 11, вимагає одночасної зміни обох вхідних сигналів х1 і х0, що практично неможливо.
Таблиця 2.1- Початкова таблиця переходів ПТП
| X Q | x1x0 | y | |||
| (0) | |||||
| (1) |
Таблиця 2.2- Таблиця переходів
| X Q | x1x0 | y | |||
| (0) | - | ||||
| (1) | - | ||||
| - | (2) | ||||
| - | (3) | ||||
| - | - | (4) | |||
| (5) | - | - |
Оскільки перехід 00 ® 11 виконати неможливо, в ПТП в відповідній клітині проставляється риска, яка інформує про наявність невизначеного стану. Аналогічно виключаються інші переходи типу 00 «11, а також 01 «10.
Етап 2. Мінімізація кількості внутрішніх станів автомата.
Ідея формальної процедури мінімізації кількості станів полягає у визначенні еквівалентних станів, де два стани є еквівалентними, якщо неможливо визначитись з різницею у їх функціонуванні, розглядаючи поточні і майбутні стани виходів автомата. Пара еквівалентних станів може бути замінена одним.
Існують детальні процедури, які дозволяють формально розв'язувати завдання мінімізації кількості станів, але на практиці їх рідко використовують. Реально це обумовлено тим, що досвідчені інженери з електроніки проектують цифрові автомати з мінімальною кількістю станів без будь-яких проблем, не використовуючи формальних процедур. Більш того, часто мають місце ситуації, коли збільшення кількості станів не ускладнює проект, а, навпаки, спрощує його, а процедури мінімізації не дають необхідної користі.
Як правило, ПТП містить ряд збиткових внутрішніх станів, усунення яких не порушить алгоритму роботи автомата, але водночас дозволить спростити його функціональну схему. В ряді випадків наявність збиткових станів не є очевидним фактом, тому для їх виявлення необхідно проводити детальний аналіз ПТП.
Скорочення частини станів асинхронного автомата базується на виявленні еквівалентних і псевдоеквівалентних станів, а також на виявленні та об'єднанні сумісних внутрішніх станів автомата (рядків ПТП).
Приклад. Автомат заданий ПТП, що наведена в табл. 2.3. Визначити еквівалентні та псевдоеквівалентні стани і скоротити кількість рядків ПТП.
Розв'язання. Відповідно до першої умови, еквівалентними можуть бути лише ті стани, які перебувають в одному і тому ж стовпчику таблиці, тобто стани (3) і (6); (1) і (4); (2) і (5); (2) і (7); (5) і (7).
З отриманих пар необхідно обрати стани, що відповідають другій умові, тобто такі, яким відповідає один і той же стан виходу. Наприклад, стан (5) має значення виходу, протилежне значенням виходів станів (2) і (7). Тому можемо стверджувати, що стани (2) і (5), а також (5) і (7) не с еквівалентними. З пар станів, що залишилися - (3) і (6); (1) і (4); (2) і (7), - еквівалентними будуть ті стани, які відповідають ще й третій умові.
Для того, щоб два стійкі стани задовольняли третю умову еквівалентності, в однакових стовпцях таблиці переходів у рядках, що відповідають цим станам, повинні перебувати одні і ті ж цифри або різні цифри, але які визначають еквівалентні стани. У прикладі, який розглядаємо, еквівалентними будуть стійкі стани (2) і (7); (1) і (4); (3) і (6).
Після того, як еквівалентні стани виявлені, їх об'єднують. При цьому кожній групі еквівалентних станів приписують один номер, а всі рядки, в які входять еквівалентні стани однієї групи, замінюються одним рядком. У розглянутому прикладі стійкий стан (7) замінюється на (2); (6) - на (3); (4) - на (1). Так само перенумеровуються і нестійкі стани 7,6 та 4 відповідно на 2, 3, 1.
Таблиця 2.3 – Задана таблиця переходів автомата
| X Q | x1x0 | y | |||
| (0) | |||||
| (1) | |||||
| (2) | |||||
| (3) | |||||
| (4) | |||||
| (5) | |||||
| (6) | |||||
| (7) |
Таблиця 2.4 – Таблиця переходів зі скороченою кількістю станів
| X Q | x1x0 | y | |||
| (0) | |||||
| (1) | |||||
| (2) | |||||
| (3) | |||||
| (4) |
У результаті отримуємо таблицю зі скороченою кількістю станів (табл. 2.4).
Для збігання номерів стійких станів з номерами рядків у табл. необхідно стани 5 і (5) перенумерувати на 4 і (4).
Для не повністю визначеного автомата, окрім поняття еквівалентності, існує і використовується поняття псевдоеквівалентності станів.
Псевдоеквівалентними називаються такі два стійкі стани автомата, яким:
- відповідає один і той самий стан входу автомата;
- відповідають стани виходів автомата, між якими немає суперечності;
- будь-якій послідовності станів входу автомата відповідають не суперечливі послідовності станів його виходу, незалежно від того, який із цих стійких станів взятий за початковий. Іншими словами, серед пар послідовностей станів входу і виходу, що починаються з цих стійких станів, не повинно бути таких, що мають суперечності
Після об'єднання еквівалентних і псевдоеквівалентних станів завжди отримують таблицю, в кожному рядку якої, як і в ПТП, міститься лише один стійкий стан. Скорочення кількості рядків, порівняно з ПТП, відбувається за рахунок зменшення кількості стійких станів.
Після вказаного об'єднання стійких станів можливе подальше спрощення таблиці переходів за рахунок об'єднання сумісних внутрішніх станів автомата.
Під сумісними внутрішніми станами розуміють два або більше станів, яким відповідають рядки з розміщенням цифр в них, що не мають суперечності, тобто такі рядки, яким відповідають однакові цифри або риски в одних і тих же стовпцях таблиці переходів.
Рядки таблиці переходів, що відповідають сумісним станам, можуть бути об'єднані в один. В об'єднаному рядку стійкі стани можуть бути у будь-якому стовпчику, тобто в разі об'єднання сумісних станів отримуємо таблицю, в рядках якої може бути декілька стійких станів. Після об'єднання сумісних станів буде отриманий автомат, еквівалентний заданому.
Об'єднання рядків з поєднаними стійкими станами виконують на основі таких правил:
- два або більше рядків можуть бути об'єднані, якщо значення вихідних змінних (станів виходу) для цих рядків збігаються для автомата Мура і можуть бути будь-якими для автомата Мілі, а номери станів, що записані в одних і тих же стовпцях, збігаються між собою або з рискою;
- в разі об'єднання станів з однаковими номерами в дужках і без них результуючий стан повинен бути у дужках (стійким);
- якщо в процесі об'єднання станів в одному з рядків міститься риска, а в іншому - номер стану, то у скороченій таблиці запишається номер стану.
Варто відзначити, що виявляти й об'єднувати еквівалентні і псевдоеквівалентні стани перед виявленням та об'єднанням сумісних станів часто немає потреби. Можна починати з виявлення й об'єднання сумісних внутрішніх станів, при цьому об'єднуються, якщо вони є, еквівалентні і псевдоеквівалентні стани. Більш того, бувають випадки, коли першочергове об'єднання псевдоеквівалентних станів недовизначеного автомата може ускладнити остаточне рішення, тобто може бути отриманий автомат з більшою кількістю внутрішніх станів, порівняно з автоматом, для якого зразу об'єднувались сумісні внутрішні стани.
Суттєву допомогу в аналізі сумісності рядків ПТП можуть надати діаграми (графи) сумісності внутрішніх станів, на яких сумісні стани розміщуються у вузлах, з'єднаних ненапрямленими лініями. Множина внутрішніх станів є сумісною, якщо всі її стани є попарно сумісними. Таку множину можна замінити одним станом. Обираючи мінімальну кількість таких множин, які охоплюють усі стани без їх повторення, отримують мінімальну кількість станів, яка достатня для реалізації автомата.
Як приклад розглянемо процедуру отримання скороченої (мінімальної) таблиці переходів з ПТП, що отримана для генератора із забороною (див. табл. 2.2). Аналіз цієї ПТП свідчить, що в ній відсутні еквівалентні і псевдоеквівалентні стани. Сумісними будуть такі множини станів: {(0), (2)}; {(1), (4)}; {(2), (5)}; {(2),(3), (5)} за Муром (показано суцільними лініями). Крім того, сумісними, за Мілі, будуть стани (1)-(0), та (4)-(0) (зображено пунктирними лініями). Загальна діаграма сумісності зображена у вигляді ненапрямлених ліній на рис. 2.4.
Розглянемо спочатку проектований автомат як автомат Мура.
Аналіз діаграми сумісності свідчить, що є можливість виділити дві групи множин сумісності:
1. {(0), (2)}; {(1), (4)}; {(3), (5)};
2. {(0)}; {(1), (4)}; {(2), (3), (5)}.
В обох випадках кількість множин дорівнює трьом. Це означає, що у скороченій таблиці переходів повинно бути три внутрішні стани.
Скорочена таблиця переходів, яка побудована на основі першого варіанта об'єднання станів, наведена у табл. 2.27.
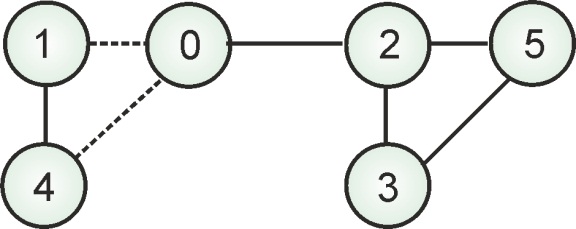
Рисунок 2.4 - Загальна діаграма сумісності
Таблиця 2.5 - Скорочена таблиця переходів
| X Q | x1x0 | y | |||
| (0, 2) | (0) | (0) | |||
| (1, 4) | (1) | (1) | |||
| (3, 5) | (2) | (2) |
Об'єднання рядків варто виконувати у декілька етапів. Спочатку об'єднувані рядки зводять в один, з меншим номером, і всі стани, що мають більші номери, замінюють меншими. Так, під час об'єднання рядків 0 і 2 двійки другого стовпця замінюють на нулі. Якщо в одному з об'єднуваних рядків маємо невизначений стан, то після об'єднання він замінюється визначеним (стовпець за умови х1х0 = 10 має невизначений стан у другому рядку). Після об'єднання сумісних рядків виконується їх перейменування (у цьому прикладі 3-й рядок замінюється на рядок з номером 2), а потім перенумеровуються всі відповідні стани новими цифрами (трійки замінюються на двійки).
Етап 3. Кодування станів автомата.
Найважливішим завданням, що має місце у кодуванні станів автомата є виключення "перегонів" його елементів пам'яті під час заданих переходів. Таке кодування називається протигоновим. Найпростіший спосіб протигонового кодування є сусіднє кодування, за якого два стани, що пов'язані між собою простими переходами, кодуються наборами двійкових чисел, що відрізняються станом лише одного ЕП (кодом Грея). Основними вимогами до автомата, в якому забезпечується сусіднє кодування станів, є:
- у графі переходів автомата не повинно бути замкнутих контурів, що містять непарну кількість вершин;
- два сусідні стани другого порядку не повинні мати більше двох станів, що лежать між ними. При цьому під станами другого порядку мають на увазі два стани, шлях між якими за графом переходів автомата складається з двох ребер (незалежно від орієнтації).
На рис. 2.5 зображені два графи, які не задовольняють вказані вимоги і не можуть бути закодовані сусідніми кодами.
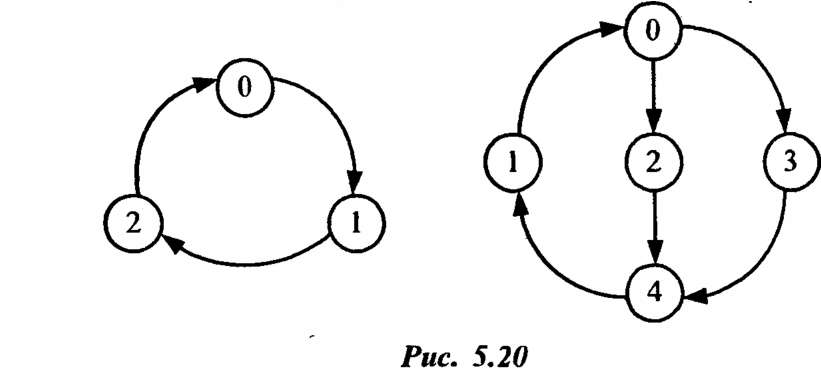
Рисунок 2.5 – Приклади графів
Граф переходів для генератора із забороною (табл. 2.2) зображено на рис. 2.6. У розглянутому випадку граф має непарну кількість вершин, але контур незамкнений. Один з варіантів кодування станів приводить до табл. 2.6.
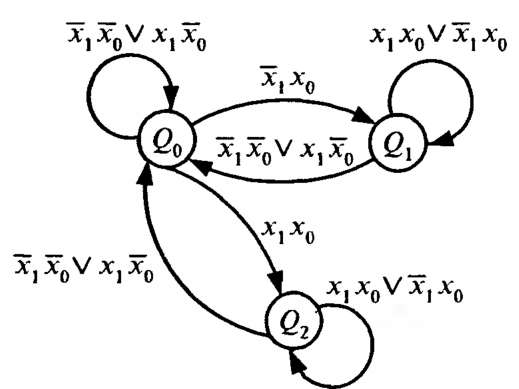
Рисунок 2.6 - Граф переходів для генератора із забороною
Таблиця 2.6 – Таблиця переходів
| Стани | Код | |
| q1 | q0 | |
| Q0 | ||
| Q1 | ||
| Q2 |
Після закінчення кодування станів будують закодовану таблицю переходів автомата, що проектується. Для цього у скороченій таблиці переходів замінюють десяткові номери станів їх двійковими кодовими значеннями. Табл. 2.6 автомата, який розглядаємо, набуде вигляду, зображеного у табл. 2.7.
Таблиця 2.7 - Таблиця переходів
| X Q | x1x0 | y | ||||
| q1 | q0 | |||||
Етап 4. Визначення функцій збудження елементів пам’яті і функцій виходів автомата.
Функції збудження ЕП автомата залежать від використовуваних типів тригерів, які обирають в їх ролі.
Розглянемо послідовно на конкретних прикладах особливості визначення функцій збудження ЕП для кожного з типів тригерів.
Таблицю переходів і RS-тригера наведено у табл. 1.36.
Визначимо функції збудження RS- тригерів. Для цього скористаємось закодованою таблицею переходів автомата (табл. 2.7), в якій замість переходів Qn ®Qn+l підставимо значення сигналів збудження відповідних входів тригерів. Тоді вона набуде вигляду, зображеного у табл. 2.8.
Таблиця 2.8 – Таблиця переходів автомата
| X Qn | x1x0 | ||||||||||||||||
| q1 | q2 | R1 | S1 | R0 | S0 | R1 | S1 | R0 | S0 | R1 | S1 | R0 | S0 | R1 | S1 | R0 | S0 |
| * | * | * | * | * | * | ||||||||||||
| * | * | * | * | * | * | ||||||||||||
| - | - | - | - | ||||||||||||||
| * | * | * | * | * | * |
Заповнення клітинок табл. 2.8 забезпечується безпосереднім використанням табл. 2.9. Розглянемо, наприклад, заповнення клітинок з координатами q1nq0n = 00 і х1х0 = 00. У цих клітинках маємо значення q1(n+1)q0(n+1) =00. Оскільки q1 і q0 - це значення прямихвиходів двох тригерів,один з яких маєвходи R1 S1 другий – R0S0,то, відповідно до табл. 2.9, значення входів R1 S1,R0S0 тригерів повинні відповідати незмінному q1 = q0 = 0 стану кожного тригера. Такі значення беруть з першого рядка табл. 5.34 і вписують у клітинки з координатами q1nq0n = 00 та ххх0 = 00 для кожного із входів тригерів. Для клітинок з координатами qx„q0n - 00 і х1х0 = 11 маємо q1(n+1) = 1, тому з табл. 2.9 обираємо значення R, S з другого рядка, значення q0(n+1) залишається незмінним на нульовому рівні, тому використовуємо перший рядок. Так послідовно заповнюють усі клітинки таблиці функцій збудження.
Для отримання функції збудження для кожного із входів тригерів переносимо їх значення на карти Карно (рис. 2.7, а - г).
Таблиця 2.9 - Значення входів R1 S1,R0S0 тригерів
| qn | qn+1 | Rn | Sn |
| * | |||
| * |
Мінімізуючи кожну з функцій збудження входів, отримуємо:
 ;
;
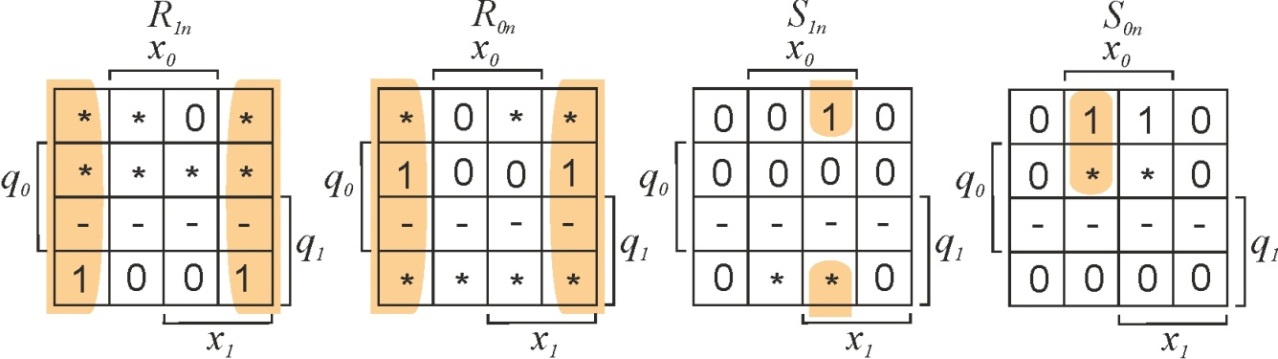
а) б) в) г)
Рисунок 2.8 – Карти Карно для функцій збудження
Для визначення функції виходу карту Карно будують на основі скороченої таблиці переходів табл. 2.8, в якій стійкі стани замінюють значеннями вихідного сигналу, а нестійкі символом "*" - довільним значенням функції. В результаті отримаємо карту, зображену на рис. 2.9.
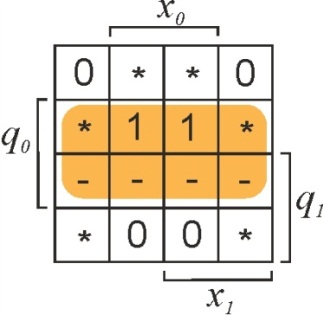
Рисунок 2.9 – Карти Карно для вихідного сигналу
З неї отримуємо мінімізоване значення функції виходу: у = qQ.
Етап 5. Складання функціональної (структурної) схеми автомата в обраному елементному базисі.
Отримані на попередньому етапі вирази функцій збудження ЕП і функції виходу дають можливість легко розробити функціональну схему автомата, яка наведена на рис. 2.10.
. 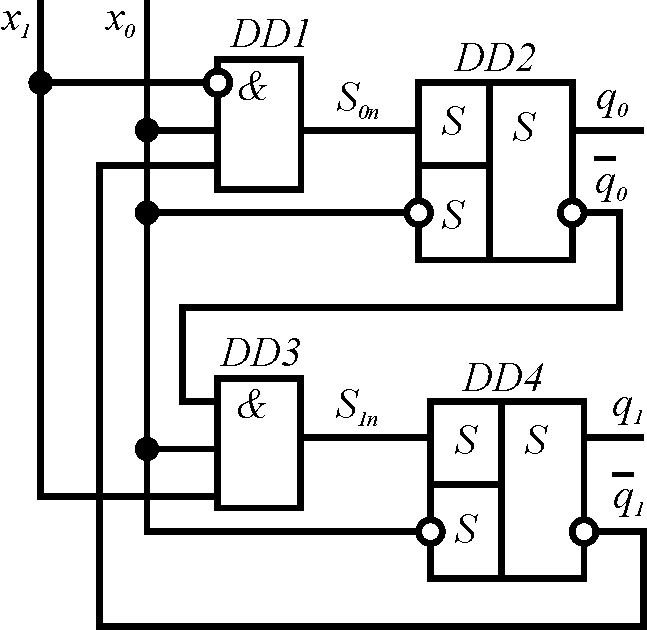
Рисунок 2.10 - Функціональна схема автомата
Розглянемо роботу синтезованого автомата відповідно до часової діаграми, що наведена на рис. 2.3.
У початковому стані за відсутності вхідних сигналів значення q0 = q1 = 0. У першому стані х1 = 0, а х0 = 1, тому, враховуючи, що  =1, сигнал S0n з виходу DDI буде поданий на тригер DD2 і встановить його вихід q в 1. Після повторення нульового стану тригер DDI установиться в початковий стан нульовим значенням вхідного сигналу x0.
=1, сигнал S0n з виходу DDI буде поданий на тригер DD2 і встановить його вихід q в 1. Після повторення нульового стану тригер DDI установиться в початковий стан нульовим значенням вхідного сигналу x0.
У другому - третьому станах за умови х1 = 1 на вході DD1 формується сигнал заборони для сигналу х0 і т. д. З цього короткого опису бачимо, що функціональна схема цілком відтворює часову діаграму, за якою спроектований автомат
Контрольні питання і завдання
1. Перелічить етапи канонічного методу структурного синтезу автомата пам'яттю.
2. Яким умовам повинен задовольняти набір елементів для структурного синтезу ЦА?
3. У чому полягає особливість етапів оптимального синтезу?
4. За якому критерієм оцінюється оптимальність синтезованої схеми?
5. Автомати якого роду необхідно використовувати у разі застосування канонічного методу структурного синтезу і чому?
6. Назвіть особливості початкових таблиць переходів (ПТП) ЦА.
7. Які внутрішні стани ЦА називаються еквівалентними?
8. Які внутрішні стани ЦА є сумісними?
9. Чи є можливість здійснити сусіднє кодування станів ЦА, якщо в його графі переходів присутній замкнутий контур з непарною кількістю вершин?.
10. Після мінімізації внутрішніх станів їх кількість зменшилась до 12. Яка кількість тригерів достатня для їх реалізації?
11. Автомат Мілі має m станів і p вхідних сигналів. Скільки станів матиме еквівалентний йому автомат Мура?
12. Поясніть різницю між еквівалентними та псевдоеквівалентними станами автомата
13. Що є умовою для об'єднання трьох (чотирьох) сумісних внутрішніх станів автомата?
14. Яка таблиця називається повною таблицею переходів (ПТП) тригера, скороченою таблицею переходів (СТП), що називається графом переходів, функцією переходів?
15. Скільки рядків і стовпчиків містить ПТП і СТП n -входового тригера?
16. Як перейти від ПТП до СТП, від ПТП до функції переходів?
17. Як побудувати ПТП синхронного тригера по ПТП асинхронного тригера того ж типу?
18. Сформулюйте теорему про структурну облиште для синтезу автоматів з пам'яттю.
19. Що називається повнотою системи переходів? Виходів?
20. У чому зміст кожного етапу структурного синтезу?








