 2015-07-21
2015-07-21 508
508Настройка промышленных регуляторов для управления объектом первого порядка с запаздыванием
Цель работы: Изучение основных законов регулирования, а также методов настройки промышленных регуляторов для управления объектом первого порядка с запаздыванием – двигателем постоянного тока.
Описание работы
Применение в системах автоматического регулирования регулирующих устройств направлено на увеличение скорости и точности протекания процессов и повышение качества управления объектами. Они широко применяются для создания локальных систем регулирования различных технологических параметров. Устройства имеют разное конструктивное исполнение и условия эксплуатации. Достоинствами этих устройств являются простота и сравнительно низкая стоимость. Классификация регуляторов осуществляется по различным критериям, например, по назначению (регуляторы температуры, давления, скорости вращения и т.п.), по характеру обработки информации (аналоговые, цифровые), по технической реализации (электрические, пневматические, гидравлические и т.п.). С точки зрения теории автоматического управления наиболее общим принципом классификации является принцип, основанный на классификации законов регулирования, вырабатываемых в регуляторах.
На практике наиболее распространенными регуляторами являются так называемые ПИД–регуляторы, реализующие закон регулирования, который в общем виде можно описать следующим образом:

| (1.1) |
Где  – коэффициент пропорциональности,
– коэффициент пропорциональности,  – время интегрирования,
– время интегрирования,  – время дифференцирования.
– время дифференцирования.
Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен уставке, то выходной равен нулю.
Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к уставке, и система стабилизируется при мощности, равной тепловым потерям. Температура не может достичь уставки, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать.
Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость.
Для устранения статической ошибки используют интегральную составляющую. Она позволяет регулятору «учиться» на предыдущем опыте. Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечивать интегральная составляющая.
Дифференциальная составляющая противодействует предполагаемым отклонениям регулируемой величины, которые могут произойти в будущем. Эти отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему. Чем быстрее регулируемая величина отклоняется от уставки, тем сильнее противодействие, создаваемое дифференциальной составляющей.
Существуют частные случаи, когда один или несколько коэффициентов приравниваются к нулю. В этих случаях образуются П, ПИ, И, ИД – законы регулирования.
Наиболее распространенным на практике является ПИ–регулятор, который обладает следующими достоинствами:
· Обеспечивает нулевую статическую ошибку регулирования.
· Достаточно прост в настройке, так как настраиваются только два параметра, а именно коэффициент усиления  и постоянная интегрирования
и постоянная интегрирования  . В таком регуляторе имеется возможность оптимизации
. В таком регуляторе имеется возможность оптимизации  что обеспечивает управление с минимально возможной среднеквадратичной ошибкой регулирования.
что обеспечивает управление с минимально возможной среднеквадратичной ошибкой регулирования.
· Обладает малой чувствительностью к шумам в канале измерения (в отличие от ПИД–регулятора).
Таким образом, в данной работе для реализации закона регулирования будем использовать ПИ–регулятор, т.е. постоянная времени дифференцирующего звена  в общем уравнении будет равна нулю.
в общем уравнении будет равна нулю.
Временные показатели качества
Временные показатели качества системы регулирования определяются по переходной характеристике замкнутой системы (рис. 1.2).
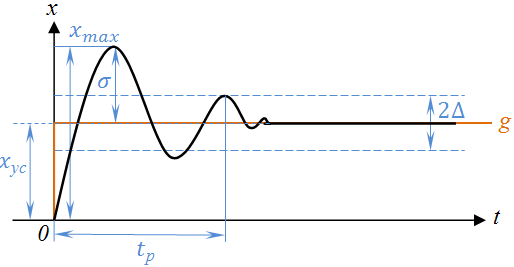
Рис. 1.2 Переходная характеристика замкнутой системы
Критерии точности системы, к которым относятся статическая и динамическая ошибки системы могут быть определены из очевидных соотношений:
Статическую ошибку системы можно вычислить, используя выражение передаточной функции системы по управляющему или возмущающему воздействиям.
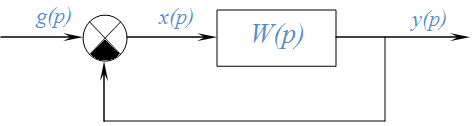
Рис. 1.3 Замкнутая система автоматического регулирования
Так для замкнутой системы, структурная схема которой показана на Рис. 1.3, ошибка системы будет равна:
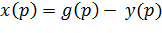
| (1.2) |
Подставляя второе уравнения в первое, найдем:
Используем теорему о предельном значении изображения:
Подставляя сюда выражение для  получим:
получим:
| (1.3) |
Если система не содержит в своем составе интегрирующих звеньев в выражении передаточной функции, что соответствует отсутствию в знаменателе передаточной функции сомножителей  , то такая система называется статической и ее статическая ошибка при
, то такая система называется статической и ее статическая ошибка при  и будет равна конечной величине, получаемой по формуле (1.3),т.е.
и будет равна конечной величине, получаемой по формуле (1.3),т.е.
 , где
, где  – коэффициент усиления разомкнутой системы.
– коэффициент усиления разомкнутой системы.
В том случае если в составе системы имеются интегрирующие звенья, то система называется астатической. Статическая ошибка системы будет равна нулю т.к.  , а выражение (1.3) для статической ошибки будет стремиться к нулю.
, а выражение (1.3) для статической ошибки будет стремиться к нулю.
Качество системы в динамическом режиме оценивается по перерегулированию:
| (1.4) |
В большинстве случаев считается, что качество системы является удовлетворительным, если величина  не превышает 10 – 30 процентов.
не превышает 10 – 30 процентов.
Быстродействие системы определяется по длительности переходного процесса. Критерием качества, характеризующим данную величину, является время регулирования  – это время, за которое процесс входит в зону
– это время, за которое процесс входит в зону  , часто требуется, что
, часто требуется, что  . В качестве
. В качестве  принимают допустимую ошибку регулирования [1].
принимают допустимую ошибку регулирования [1].
Методы настройки ПИД–регуляторов
Метод незатухающих колебаний.
Данный метод также называют методом Циглера – Николса (J. G. Ziegler, N. B. Nichols) [2]. Настройка по данному методу происходит следующим образом: в работающей системе выключаются интегральная и дифференциальная составляющие регулятора ( ), т.е. система переводится в П–закон регулирования. Путем последовательного увеличения
), т.е. система переводится в П–закон регулирования. Путем последовательного увеличения  с одновременной подачей небольшого скачкообразного сигнала задания добиваются возникновения в системе незатухающих колебаний с периодом
с одновременной подачей небольшого скачкообразного сигнала задания добиваются возникновения в системе незатухающих колебаний с периодом  . Это соответствует выведению системы на границу колебательной устойчивости. При возникновении данного режима работы фиксируются значения критического коэффициента усиления регулятора
. Это соответствует выведению системы на границу колебательной устойчивости. При возникновении данного режима работы фиксируются значения критического коэффициента усиления регулятора  и периода критических колебаний в системе
и периода критических колебаний в системе  . При появлении критических колебаний ни одна переменная системы не должна выходить на уровень ограничения. По значениям и рассчитываются параметры настройки регулятора:
. При появлении критических колебаний ни одна переменная системы не должна выходить на уровень ограничения. По значениям и рассчитываются параметры настройки регулятора:
Табл. 2. Таблица настройки параметров МНЗК.
| Закон регулирования | 
|
| 
|
| П | 
| 
|
|
| ПИ | 
| 
|
|
| ПИД | 
| 
| 
|
Формульный метод
Метод используется для быстрой приближенной оценки значений параметров настройки регулятора для трех видов оптимальных типовых процессов регулирования.
Табл. 3 Таблица настройки параметров ФМ.
| Закон регулирования |
|
|
|
| П | 
|
|
|
| ПИ |
| 
|
|
| ПИД | 
| 
| 
|
Где  – время запаздывания,
– время запаздывания, 
Замечание.
Т.к. исследуемый объект практически не обладает запаздыванием, рассчитанные значения для могут быть слишком велики, тогда рекомендуемое значение можно брать из диапазона  .
.








