2015-08-21
2015-08-21 1143
1143СУ – система управления
УС – управляющая система
ОУ – объект управления
Структура (контур) систем неавтоматизированного управления
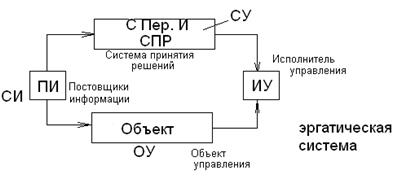
В основном структура управления определяется видом ОУ. Так если объект представляет из себя неавтоматизированную систему (нет СЧПУ, невозможно получить от ОУ информацию в виде электрических сигналов (дискретных, непрерывных, цифровых, аналоговых)), то этот контур будет иметь следующий вид: например коллектив студентов в вузах. Этот объект – эргономическая система. Такой объект не может воспринять сигналы того и иного вида в общем случае.
ПИ – постановщик информации
СИ – сборщик информации
Эта информация поступает в некую неавтоматизированную систему управления СУ. СУ представляет собой неавтоматизированную систему переработки информации, выполняет некое неавтоматизированное управление (вырабатывает управляющие сигналы)
СПР – система принятия решений
ИУ – исполнитель управления.
В эргатической системе не участвуют технические средства.
Структура (контур) систем автоматизированного управления
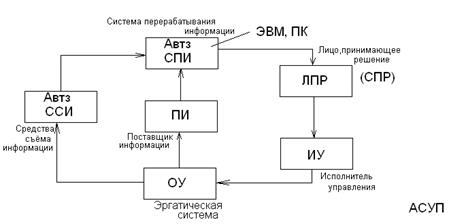
Автз ССИ – автоматизированные средства съема информации (например, считыванием штрих-кодовой информации, машинные карты)
РП – регистраторы производства
Автз СПИ – автоматизированные системы переработки информации. Здесь идет выдача вариантов решений.
ЛПР – лицо принимающие решения. ЛПР отбирает из ряда вариантов, предлагаемых компьютером, наилучший вариант для конкретной ситуации.
Структура (контур) автоматического управления
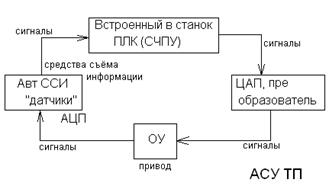
Структура (контур) полуавтоматического управления. Структура АСУТП (SCADA-система)
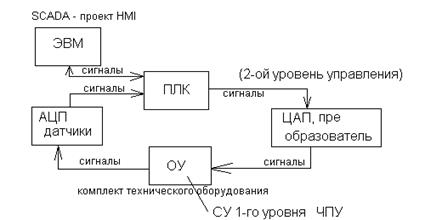
ОУ – комплекс технологического оборудования (либо ГАК, либо непрерывный техпроцесс)
ПЛК – сеть контроллеров, осуществляют систему управления 2-го уровня.
Как правило, для оперативного вмешательства в сложный технический процесс (сложную продвинутую АТП) в структуру управления ставиться ЭВМ, на которой отображается (в линию) технологический процесс.
Удобно организованный интерфейс с оператором (диспетчером) носит название HMI (Human-Machine Interface)
В ГАП, на современных предприятиях реализованы все такие системы (автоматизированные и не автоматизированные). Иногда эти контуры даже в составе одной системы могут пересекаться. Например, рассмотрим автоматизированную систему (2).
Основы разработки АСУ ГАК
Типовая курсовая работа – типа комментарий
Здесь объект – совокупность устройств с ЧПУ, каждый из которых, например станок, выполняет локальную (частную, определенную) технологическую задачу (обработка детали по заданной программе). Этот контур управления детально не рассматривается, но оговаривается. Задача синхронизации управления комплексом технологического оборудования является задачей управления второго уровня (ЧПУ). На втором уровне это выполняет ПЛК. В общем случае модель управления (математическая) и алгоритм не зависят от типа применяемого ПЛК. На первом этапе можно иметь ввиду что мы рассматриваем С 300.
Итак, согласно плану в разделе 2, рассматривается п 2.2: штатные ситуации управления по обработке детали, п 2.3: по возможности выявленные нештатные ситуации, обработка которых возможна в СУ 2-го уровня. Например, превышен лимит времени, отведенное на обработку детали на данной операции, поломка режущего инструмента и др., все эти сигналы ЛСУ сама отдает во внешнюю среду.
Раздел 3. В п. 3.1 оговаривается возможность съема информации, необходимой для управления, необходимой для управления, в том числе либо взаимодействие систем управления СУ 1 и СУ 2; датчики, с помощью которых информация может быть снята с оборудования. Средства передачи если рассматривается С 300 могу быть??? промышленная сеть. Переработки и выдачи (оговорить). В п. 3.2 строиться таблица входных данных:
| № | Описание входных данных | характеристика | |
| . . . . . . . . . . | Состояние входного контейнера Состояние станка Состояние полуфабриката на промежуточном столе станка С3 Состояние робота Р1 робот выведен на позицию А1 Наличие в схвате робота ПФ1 Состояние схвата | Пустой Включен ПФ 2 (полуфабрикат) Да Есть Разжат (пустой) | Не пустой Не включен ПФ 3 Нет Нет Сжат (полный) |
Отдельно, или в указываются типы сигналов или возможные принимаемые значения: 0 или 1 – число состояний может быть больше одного) (бытовые, логические???) В соседних графах указывается типы сигналов штатный, нештатный, возможно аварийный или др. Систематизация данных выходных сигналов:
| № | Описание выходных данных | Тип сигнала |
| Сигнал роботу на перемещение в позицию А3 Оповещающие сигналы оператору (смена окончена, оборудование выключено, сбой, авария) |
В основном для управления роботом используется выдача ему некоторого кода заложенной в него программы (или одной из программ).
Робот {Р1, Р2, Р3} – перечень программ. Р1 можно задавать кодом, например Р25. Сделать оповещения о ситуациях.
Раздел 4. Добавить п. 4.0 «Декомпозиция задачи управления» или «Разделение общей задачи на подзадачи». Например, данный алгоритм задачи разделятся над под задачи:
Перемещение робота на позицию А1, для ее решения необходимы условия:
Схват робота пустой
Робот на позиции А3
Стакан СТ21 уже загружен (полигон полон)
Или:
схват робота пустой
робот на позиции А4
Стакан СТ22 уже загружен (т. е. патрон полон)
Перемещение робота на позицию А8
В схвате робота деталь есть
Робот в позиции А7
Сигнализация о нештатной ситуации (нужно видоизменить управление).
превышен лимит времени на выполнение некой частной операции
в схвате робота заготовка
робот в позиции А2
патрон станка СТ12 полон
станок СТ12 выключен
п. 4.1 Идентификация данных
Для разработки математической модели необходимо присвоить математический идентификатор каждой из входных и выходных переменных.
Множество входных сигналов:
x = { 
множество выходных сигналов:
y 
необходимо поставить в соответствие каждый сигнал со своим идентификатором.
Для сигналов, принимающих логические значения можно использовать запись:
Для входных
| № | идентификатор | Сигнал | |
| X |  | ||
 | Входной контейнер пуст () |  (не пуст) (не пуст) | |
| Для выходных | |||
 | 0 v 1 | {7, 3,5} {1…12} |
п. 4.2 Разработка математической модели, функциональные зависимости сигналов
Упрощенная математическая модель связывает входные сигналы с выходными, идущими от оборудования.
Например, команда по перемещению робота на позицию А1 может быть описана:
 - принимает два состояния как состояние схвата робота ( - схват зажат,
- принимает два состояния как состояние схвата робота ( - схват зажат,  - схват разжат)
- схват разжат)
 - ( - схват полный,
- ( - схват полный,  - схват пустой)
- схват пустой)
 - на станке Ст 20 есть деталь
- на станке Ст 20 есть деталь
 - на станке Ст 21 есть ПФ,
- на станке Ст 21 есть ПФ,  - нет
- нет
 - робот на позиции А23,
- робот на позиции А23,  – нет
– нет
 - робот на позиции А 24,
- робот на позиции А 24,  – нет
– нет


При помощи кодов:



Сети Петри

P – множество позиций
T – множество переходов
I – множество входных сигналов
O – множество выходных сигналов
 – маркировка
– маркировка
 - фишки
- фишки
Позиции связываются только с переходами, а переходы только с позициями. Таким образом с точки зрения теории графов: позиции и переходы это вершины графа, а входные и выходные функции (они рассматриваются относительно перехода) – это дуги графа.
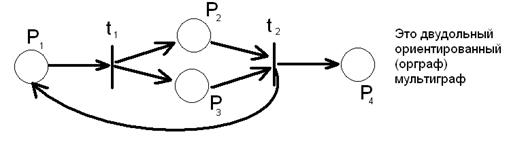
Двудольный – существуют два различных подмножества вершин (T и P).
Ориентированный – ребра связывающие вершины, ориентированные дуги
Мультиграф – есть хотя бы одна вершина, которой инцидентна больше чем одна дуга.
Кратные дуги связывают также позицию с переходом или переход с позицией.
Входные функции рассматриваются относительно перехода.
Выходные – из перехода в позицию.
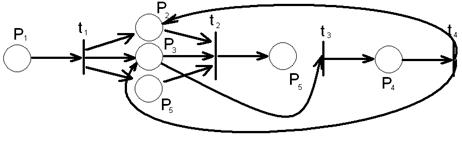
Пример:
I(t1)={P1} O(t1)={P2, P3, P5}
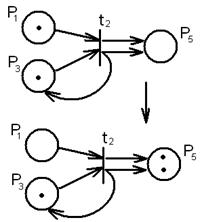
I(t2)={P2,P3,P5} O(t2)={P5}
I(t3)={P3} O(t3)={P4}
I(t4)={P4} O(t4)={P2, P3}
Маркировка сетей Петри
Маркировка сетей Петри состоит в присваивании фишек (точек) позициям сети Петри. Фишки также элемент сети Петри, поэтому маркированную сеть Петри обозначают 
Правила выполнения сетей Петри
Сеть Петри (М) можно выполнить, выполнением управляют количества фишек в сети и их распределение по позициям и переходам.
Выполнение – есть запуск переходов. Запуск осуществляется удалением фишек из его (перехода) входных позиций и присвоением его выходным позициям. Переход может запускаться только тогда, когда он является разрешенным.
Переход является разрешенным только тогда, когда каждая из его входных позиций имеет число фишек  (не меньше) числа дуг из позиций в переход. При этом кратные дуги должны иметь кратное число фишек. Фишки, находящиеся в позициях, которые разрешают переход, называют разрешающими фишками.
(не меньше) числа дуг из позиций в переход. При этом кратные дуги должны иметь кратное число фишек. Фишки, находящиеся в позициях, которые разрешают переход, называют разрешающими фишками.
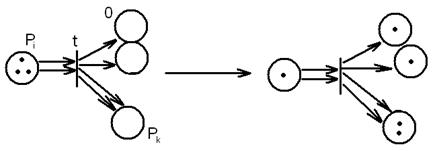
Переход запускается удалением разрешающих фишек из его входных позиций с последующим помещением по одной фишке в каждую из его выходных позиций.
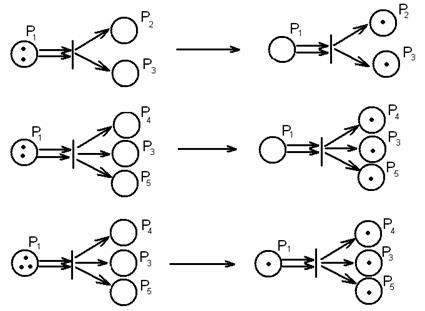
Переход будет разрешен всякий раз, когда в его входных позициях окажутся разрешающие фишки.
После запуска каждого перехода в сети образуется сеть  . В результате запуска разрешенного перехода образуется новая маркировка:
. В результате запуска разрешенного перехода образуется новая маркировка:

# - кратные дуги
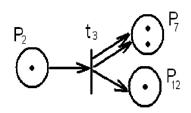
Пусть С задана:!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
{ P7, P7,P12}=
={2P7,P12}
Пусть С задана
I(t2)={P1,P3}
O(t2)={P3,2P5}
 ((((((((((((((((((((((((((((((((((((((((((((((((((((
((((((((((((((((((((((((((((((((((((((((((((((((((((