 2015-08-13
2015-08-13 554
554Примером двойного электромагнита для активной левитации будет служить лабораторный прототип MLS2EM. Это два электромагнита, расположенные обособленно друг от друга (рис.1). Они генерируют электромагнитную силу, необходимую для левитации. Система управления регулирует значение силы, чтобы стабилизировать левитируемый объект с желаемой жесткостью и свойствами депфирования.
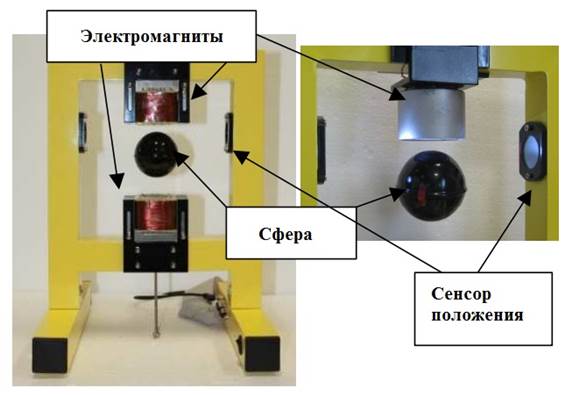
Рисунок 1. Одноосевой двойной электромагнит для системы активной магнитной левитации САМЛ (MLS2EM) и модифицированный вариант с цилиндрическим электромагнитом.
Электромагнитная сила, генерируемая электромагнитами, зависит от конструкции позиционера, управляющего сигнала и расстояния до левитируемого объекта. Рассматривается ток в катушке, динамика левитиремого объекта, которая описываются формулой (1).

где: х1-положение объекта, х2- скорость, F1, F2- силы, генерируемые верхним и нижним электромагнитами, соответственно. Fg- сила тяжести, m- масса объекта. Уравнение (1) может быть использовано во многих задачах контроля в зависимости от взаимодействия гравитационного поля и контроля одного или двух электромагнитов. Как правило, это можно описать уравнением (2), если использовать электромагнитный коэффициент KЕМ.

Для достижения стабильной левитации и управления динамическими параметрами используется обратная связь контроля. Для контрольного результата рассчитывается ошибка состояния е = хd-x. Для стабильной операции хd, векторные элементы отвечают: хd1 - за желаемый уровень левитации и хd2- за нулевую скорость. Когда напряжение в катушке будет существовать в рамках уравнения (1), тогда это уравнение разобьется на два электрических уравнения, отвечающих за динамику работы позиционера.








