 2015-08-21
2015-08-21 2006
2006В настоящее время нейронные сети нашли успешное применение для проектирования систем управления динамическими процессами. Универсальные возможности аппроксимации с помощью многослойного персептрона делают их полезным инструментом для решения задач идентификации, проектирования и моделирования нелинейных регуляторов [15].
Ниже описаны 3 архитектуры нейронных сетей, которые реализованы в ППП Neural Network Toolbox в виде следующих контроллеров:
· контроллера c предсказанием (NN Predictive Controller);
· контроллера на основе модели авторегрессии со скользящим средним (NARMA-L2 Controller);
· контроллера на основе эталонной модели (Model Reference Controller).
Ниже представлено краткое описание каждой из этих архитектур и способы их применения на практике. Применение нейронных сетей для решения задач управления позволяет выделить 2 этапа проектирования:
· этап идентификации управляемого процесса;
· этап синтеза закона управления.
На этапе идентификации разрабатывается модель управляемого процесса в виде нейронной сети, которая на этапе синтеза используется для синтеза регулятора. Для каждой из трех архитектур используется одна и та же процедура идентификации, однако этапы синтеза существенно различаются.
При управлении с предсказанием модель управляемого процесса используется для того, чтобы предсказать его будущее поведение, а алгоритм оптимизации применяется для расчета такого управления, которое минимизирует разность между желаемыми и действительными изменениями выхода модели.
При управлении на основе модели авторегрессии со скользящим средним регулятор представляет собой достаточно простую реконструкцию модели управляемого процесса.
При управлении на основе эталонной модели регулятор – это нейронная сеть, которая обучена управлять процессом так, чтобы он отслеживал поведение эталонного процесса. При этом модель управляемого процесса активно используется при настройке параметров самого регулятора.
В последующих разделах обсуждаются все 3 структуры систем управления и архитектуры соответствующих нейросетевых контроллеров. Каждый раздел включает краткое изложение принципа управления динамическим процессом и сопровождается описанием сценария функционирования проектируемой системы, который реализован в виде комбинации GUI-интерфейса и динамической модели регулятора в системе Simulink.
Динамические модели систем управления с нейросетевыми регуляторами размещены
в специальном разделе Control Systems набора блоков Neural Network Blocksets (рис. 9.28)
и включают 3 упомянутые выше модели регуляторов, а также блок построения графиков.
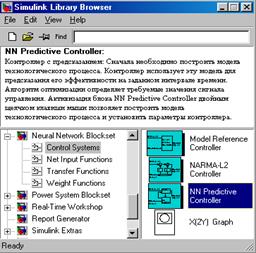 Рис. 9.28
Рис. 9.28
Поскольку ни один конкретный регулятор не является универсальным, то описаны функциональные возможности всех трех типов регуляторов, каждый из которых имеет свои преимущества и недостатки.
Регулятор с предсказанием. Этот регулятор использует модель управляемого процесса в виде нейронной сети, для того чтобы предсказать будущие реакции процесса на случайные сигналы управления. Алгоритм оптимизации вычисляет управляющие сигналы, которые минимизируют разность между желаемыми и действительными изменениями сигнала на выходе модели и таким образом оптимизируют управляемый процесс. Построение модели управляемого процесса выполняется автономно с использованием нейронной сети, которая обучается в групповом режиме с использованием одного из алгоритмов обучения. Контроллер, реализующий такой регулятор, требует значительного объема вычислений, поскольку для расчета оптимального закона управления оптимизация выполняется на каждом такте управления.
Регулятор NARMA-L2. Изо всех архитектур этот регулятор требует наименьшего объема вычислений. Данный регулятор – это просто некоторая реконструкция нейросетевой модели управляемого процесса, полученной на этапе автономной идентификации. Вычисления в реальном времени связаны только с реализацией нейронной сети. Недостаток метода состоит в том, что модель процесса должна быть задана в канонической форме пространства состояния, которой соответствует сопровождающая матрица, что может приводить к вычислительным погрешностям.
Регулятор на основе эталонной модели. Требуемый объем вычислений для этого
регулятора сравним с предыдущим. Однако архитектура регулятора с эталонной моделью требует обучения нейронной сети управляемого процесса и нейронной сети регулятора. При этом обучение регулятора оказывается достаточно сложным, поскольку обучение основано на динамическом варианте метода обратного распространения ошибки [16]. Достоинством регуляторов на основе эталонной модели является то, что они применимы к различным классам управляемых процессов.








