 2015-08-21
2015-08-21 941
941Электрическое торможение широко применяется благодаря возможности ценным качествам: плавности торможения, простоте, отсутствию быстроизнашиваемых деталей, возможности работы с возвратом энергии в сеть, легкости автоматизации.
Применяют три основных режима электрического торможения:
а) генераторное торможение - торможение с возвратом энергии в сеть; б) торможение противовключением; в) динамическое торможение, рис. 9.
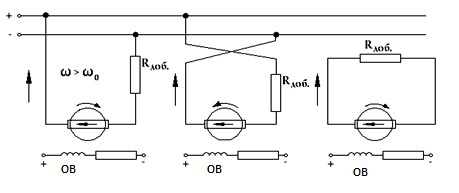
в)
а) б)
Торможение с возвратом энергии возможно в крановых и других приводах при спуске грузов, когда  превышает скорость идеального
превышает скорость идеального  , при этом E > U и ток якоря меняет свое направление на обратное
, при этом E > U и ток якоря меняет свое направление на обратное  . Электрическая схема не претерпевает изменений, поэтому с учетом изменения направления тока якоря уравнение движения двигателя примет вид:
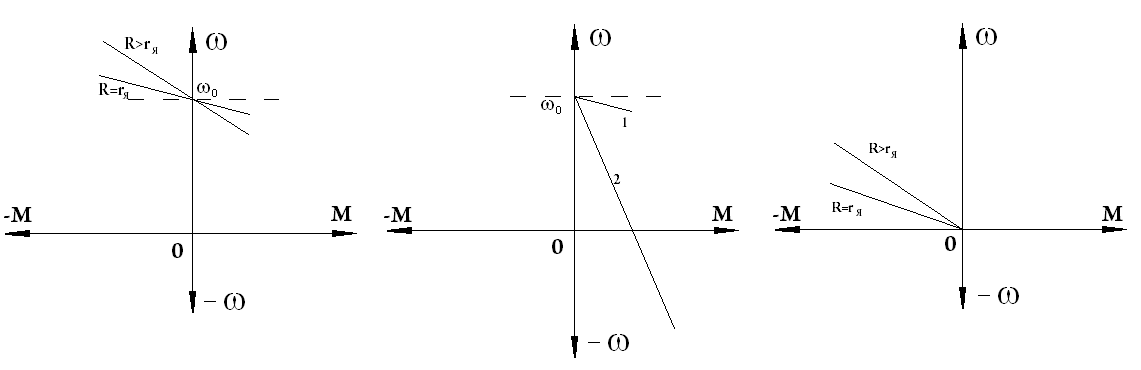
. Электрическая схема не претерпевает изменений, поэтому с учетом изменения направления тока якоря уравнение движения двигателя примет вид:  . Механические характеристики при этом являются продолжением характеристик двигательного режима и располагаются во II квадрантах, рис. 10а.
. Механические характеристики при этом являются продолжением характеристик двигательного режима и располагаются во II квадрантах, рис. 10а.
а) б) в)
Рис. 10 Механические характеристики электродвигателя независимого возбуждения в тормозных режимах: а) генераторном; б) противовключением; в) динамическом.
Торможение противовключением создается при реверсе электродвигателя, а также в подъемных механизмах в моменты, когда под действием груза двигатель вращается в обратную сторону, чем он включается. Уравнение механической характеристики при этом: 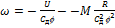 .
.
Здесь напряжение сети к ЭДС совпадают по направлению, поэтому ток якоря определяется из уравнения  или
или  умножив левую и правую часть на I, получим:
умножив левую и правую часть на I, получим:
 ,
,
где  - мощность, расходуемая на нагрев,
- мощность, расходуемая на нагрев,  - мощность, подводимая из сети,
- мощность, подводимая из сети,  - мощность, подводимая со стороны вала рабочей машины и преобразуемая в электрическую.
- мощность, подводимая со стороны вала рабочей машины и преобразуемая в электрическую.
При  :
:  .
.
Из характеристики, рис. 10б видно, что при  тормозной момент имеет большое значение, что обеспечивает очень эффективное торможение.
тормозной момент имеет большое значение, что обеспечивает очень эффективное торможение.
Динамическое торможение осуществляют отключением якорной цепи от сети и замыканием на сопротивление. При таком включении двигатель работает как генератор, нагруженный на R, и развивает тормозной момент, направленный против движения. Механическая характеристика определяется уравнением, которое выводится из основного уравнения движения при 

Тормозной момент растет с уменьшением R.
При спуске груза, когда тормозной момент уравновешивает активный статический момент при уменьшении R уменьшается и, наоборот, при увеличении R растет . Характеристики динамического режима торможения располагаются в I квадранте, рис 10,в.








