 2015-09-06
2015-09-06 698
698Определение геометрических параметров бульдозеров и скреперов
Геометрические параметры машин можно определить по зависимостям, приведенным в табл. 6, 7 и по рекомендациям [5].
Таблица 6
| Параметры | Зависимость параметра от мощности двигателя для гусеничного бульдозера |
| Тяговое усилие, II | Т = (1150... 1200)×N |
| Длина бульдозера (полная), мм | L = (900... 1250)×3√N |
| Ширина бульдозера общая (отвала), мм | S«= (650... 850)×3√N |
| Высота бульдозера (максимальная), мм | H6 = (410...650)×3√N |
| Ширина гусеницы, мм | S, = (100... 1S0)× 3√N |
| Ширина колеи, мм | Sk = (350...550)× 3√N |
| Вес полный, т | G = 2,6×3√N |
| Вес рабочего оборудования, т | Gpa6 = (0,013... 0,015)×N |
Схемы машин с полученными размерами представлены на рис. 1, 2, 3.
Определение геометрических параметров одноковшовых экскаваторов
Одноковшовые экскаваторы выполняются с механической трансмиссией и гидравлические с объемным приводом.
1.2.1. Экскаваторы с механической трансмиссией [6].
Масса машины определяется по формуле
т = KM × q,
где Км —коэффициент пропорциональности, кг/м3;
q — вместимость ковша, м3.
Для универсальных экскаваторов Км = (20...36)×103; для легких условий работы следует принимать меньшие значения, для тяжелых — большие.
Геометрические размеры машины Lj и рабочего оборудования определяются по зависимости: 

где Kl — коэффициент размеров машины. Для габаритных размеров машины рекомендуются следующие KL [6]:
| Высота кузова | 0,095…0,125 |
| Радиус задней стенки кузова | 0,09…0,095 |
| Радиус пяты стрелы | 0,033…0,038 |
| Высота пяты стрелы гусеничного экскаватора Нпг | 0,043…0,048 |
| База гусеничного хода | 0,101…0,116 |
| Длина гусеницы | 0,118…0,138 |
| Ширина хода | 0,095…0,11 |
| Ширина звена | 0,02…0,017 |
| Высота гусеницы | 0,026…0,03 |
| Высота звена | 0,003…0,0045 |
| Клиренс под платформой | 0,029…0,032 |
| Высота двуногой стойки | 0,01…0,011 |
Высота пяты стрелы экскаватора на пневмоходу Нпп определяется после выбора пневматических шин Дщ,
Нпп = Нпг(Дш - Нг).
Размеры рабочего оборудования определяются по зависимостям, приведенным в табл. 8.
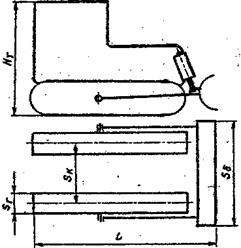
Рис.1. Схема бульдозера
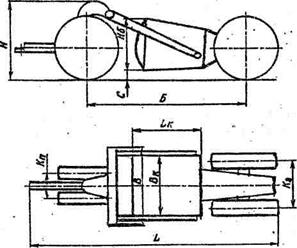
Рис.2. Схема скрепера прицепного
|
 |
Рис.3. Схема скрепера самоходного
Таблица 7
| Параметры | Зависимость параметра от ёмкости ковша q, м3 | |
| для прицепных скреперов | для самоходных скреперов | |
| Ёмкость ковша с шапкой, м3 | q1 = 1,3q | q1 = 1,2q |
| Мощность тягача, кВт | N = 10 + 18,5q | N1 = 17,7q |
| Тяговое усилие, Н | Т = 10.000q | Т1 = 10.000q |
| Вес скрепера, Н | G = (10.000…12.000)q | G1 = (11.000…15.000)q |
| Длина скрепера, мм | L = 1.200 + 4.200 
| L1 = (4.500 + 5.200)
|
| Ширина скрепера, мм | B = (1.500…1.700)
| B1 = (1.200…1.400)
|
| Высота скрепера, мм | H = (0,8…1,2)1.400
| H1 = (1.200…1.400)
|
| База скрепера, мм | Б = (2.800…3.300)
| Б1 = (2.800…3.300)
|
| Колея передних колёс, мм | Кп = (0,8…1,2)860
| Кп1 = (0,8…1,2)860
|
| Колея задних колёс, мм | Кз = (860…1.100)
| Кз1 = (860…1.100)
|
| Длина ковша, мм | Lк = (0,84…1,16)660
| Lк1 = (0,87…1,13)[1.050 + 765  ] ]
|
| Ширина ковша, мм | Bк = (0,85…1,15)1.380
| Bк1 = (0,87…1,13)(400 + 1600 )
|
| Высота боковой стенки ковша, мм | Hб = (0,83…1,17)710 
| Hб1 = (0,9…1,1)(250 + 520 )
|
| Высота подъёма передней заслонки, мм | Нп = (0,8…1,2)716
| ---------- |
| Клиренс под ножом ковша, мм | С = (0,75…1,25)340
| ---------- |
| Максимальная скорость, км/ч | Vmax = 20 – 1,5 
| Vmax1 = 12 + 15,3
|
Таблица 8
| Элементы рабочего оборудования | Прямая лопата | Обратная лопата | Драглайн |
| Длина стрелы | lс = (0,21…0,2) 3√m | lс = 7 3√q | lс = (0,45…0,46) 3√m |
| Длина рукояти | lр = (0,7…0,8)lс | lс = (0,35…0,5)lс | ---------- |
| Длина дополнительной стойки | ---------- | lст = 0,15) 3√m | ---------- |
| Ширина ковша | bк = (1,05…1,1) 3√q | bк = 1,15 3√q | |
| Длина ковша | Lк = 1,25 3√q | Lк = 1,25 bк | |
| Высота ковша | hк = 0,9 3√q | hк = 0,75 bк |
Примерное распределение массы экскаватора между основными сборочными единицами (в долях от массы всей машины) приведено в табл. 9.
Таблица 9
| Рабочее оборудование | Вид ходового устройства | Наименование сборочной единицы | |||||
| Ходовое устрой-ство | Плат-форма пово-ротная | Про-тиво-вес | Стре-ла | Рукоять | Ковш | ||
| Прямая лопата | колёсное | 0,25 | 0,54 | 0,05 | 0,07 | 0,045 | 0,045 |
| гусеничное | 0,34 | 0,45 | 0,05 | 0,07 | 0,045 | 0,045 | |
| Обратная лопата | колёсное | 0,24 | 0,56 | 0,06 | 0,07 | 0,03 | 0,04 |
| гусеничное | 0,34 | 0,46 | 0,06 | 0,07 | 0,03 | 0,04 | |
| Драглайн | колёсное | 0,26 | 0,56 | 0,06 | 0,06 | ----- | 0,06 |
| гусеничное | 0,34 | 0,48 | 0,06 | 0,06 | ----- | 0,06 |
Скорости основных движений рабочего органа в зависимости от вида оборудования приведены в табл. 10.
Таблица 10
| Тип рабочего оборудования | Выполняемое движение | Скорости движения при вместимости ковша q, м3 | ||
| 0,25…0,8 | 1,0…1,5 | 2,0…3,0 | ||
| Прямая лопата | Подъём ковша Vк | 0,5 | 0,6 | 0,8 |
| Напор рукояти Vн | 0,5 | 0,6 | 0,8 | |
| Возврат рукояти Vв | Vв = (1,3…1,5)Vн | |||
| Обратная лопата | Тяга ковша Vт | 0,35 | 0,4 | 0,45 |
| Подъём рабочего оборудования Vп | 0,25 | 0,3 | 0,3 | |
| Драглайн | Тяга ковша Vт | 0,7 | 0,8 | 0,9 |
| Подъём ковша Vп | 0,8 | 1,0 | 1,2 |
Частоту вращения поворотной платформы можно определить по эмпирической зависимости:
nI = 3,2 - q; nII = 6,7 - 0,9q,
где nI — первая скорость (для работы с крановым обору дованием), 1/мин;
nII — вторая скорость (для работы с экскавационным оборудованием), 1/мин.
Скорость передвижения экскаватора выбирается равной скорости машины прототипа с дальнейшим уточнением в зависимости от параметров двигателя и трансмиссии.
Так, для экскаваторов на пневмоколесном ходу V1 = 19…22 км/ч. на гусеничном ходу V2 = 1,4...2,9 км/ч (Прил. табл. 21-1 в [9].








