2015-09-06
2015-09-06 469
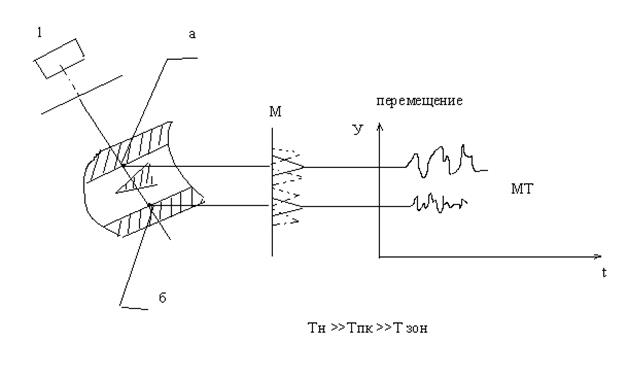
469Такие изображения в основном используются для исследования сердца, т. е. объекта, который всегда в движении. Данный вид изображения используется для получения эхокардиограммы, причем время наблюдения Тн за движущимися элементами сердца должно быть значительно больше, чем период периодических колебаний ТПК, а он должен быть много больше, чем период исследования УЗ импульсов – импульсов зондирования. Тогда можно получить М – изображения в виде, например, амплитуд импульсов, перемещенных по вертикали или ярких пятен на экране осциллографа от точек а и b. Более удобным является ТМ – изображение, где по оси у откладываются перемещения точек а и b, и одновременно осуществляется регистрация этих перемещений во времени на экране осциллографа или компьютера, получаем ТМ – грамму.
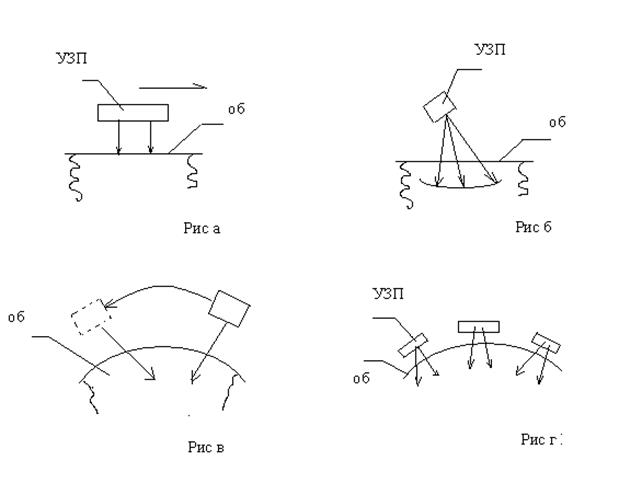
Виды сканирования.
Различают:
· Линейное сканирование при котором УЗ преобразователь движется вдоль объектапрямолинейно.
· Веерное (секторное) сканирование при котором УЗ преобразователь поворачивается вокруг некоторой точки, создавая последовательность нескольких лучей, образующих веер в некотором секторе.
· Дуговое (радиальное) сканирование, при котором движение по дуге
УЗ преобразователь посылает по радиусу излучения в объект.
· Комбинированное сканирование, при котором сочетается, например, линейное и веерное сканирование.
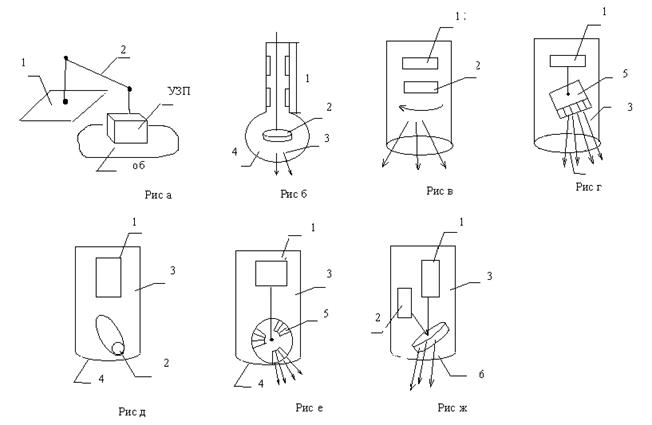
Ультразвуковые сканирующие устройства.
Различают механические и электрические ультразвуковые устройства. Причем, механические ультразвуковые устройства могут быть ручными - с ручным перемещением, и с электромеханическим перемещением.
Рис а: Ручное сканирование – это ультразвуковое устройство размещается на шарнире 2, укрепленном на штативе 1, а перемещение ультразвукового устройства осуществляется вручную.
Рис б – ж: Схемы ультразвуковых устройств с электрическим приводом. Где на рис б – г привод 1, а с ним вместе ультразвуковое устройство 2 или 5 осуществляет движение качания, что создает веерный поток ультразвукового излучения. В корпусах сканирующих устройств электромеханического типа в инверсионной жидкости 3, причем, нижняя каждого из корпусов снабжена тонкой мембраной 4, через которую излучение вводится в объект исследования. Инверсионная жидкость – жидкость для погружения. На рисунке: 5 – одиночный ультразвуковой преобразователь, 5 – многоэлементный ультразвуковой преобразователь.
Рис д и е:Показаны сканирующие устройства с приводом вращательного движения. Рис д – с одиночным преобразователем, рис е – с многоэлементным преобразователем.
Рис ж: Сканирующее устройство с рафлектором 6, обеспечивает отражение ультразвукового излучения. Источник 2, причем рефлектор совершает колебательные движения.
Электрические ультразвуковые сканирующие устройства.
Различают:
· С фазируемой матрицей
· С коммутируемой матрицей
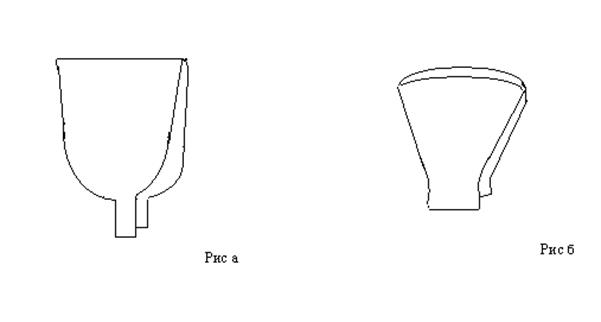
Пьезоэлектрические преобразователи таких устройств выполняются линейными (рис а) и веерными (рис б) (конвексными). Могут содержать несколько сотен элементов, имеющих ширину от 10 до 100 мм.
В электрических сканирующих устройствах отсутствуют подвижные элементы, а сканирование осуществляется электрическим путем, что увеличивает надежность исследования.
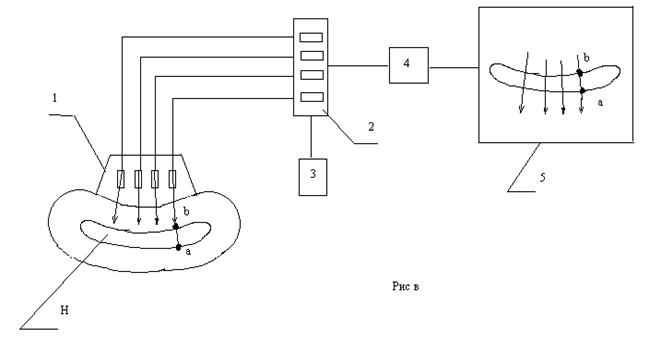
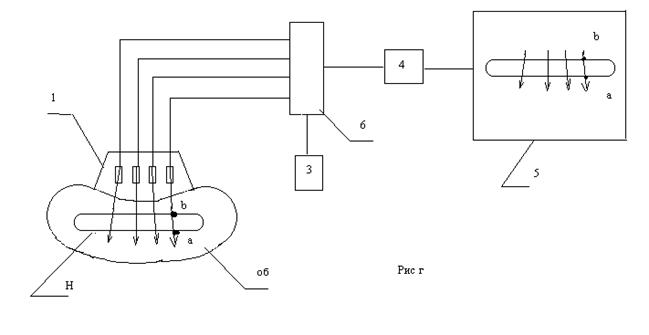
На рис в и г соответственно показаны сканирующие устройства с фазируемой и коммутируемой матрицей.
Фазируемые матрицы – аналоговые, а коммутируемые – цифровые устройства. Сам матричный приемник может быть как линейным, так и веерным.
В устройстве с фазируемой матрицей сигналы от последней воспринимаются блоком 2. В нем размещены линии задержки сигнала, поэтому, после подачи от генератора сигнала, возбуждаются элементы матрицы. От этих элементов поступают в устройство обработки 4 поочередно (очередность создается линиями задержки б блоке 2, причем задержка различна для каждого элемента) что позволяет на экране монитора 5 изображать результат сканирования, создавая каждый из элементов фазируемой матрицы. 3 – устройство управления. Такие устройства снабжены линейными многоэлементными ультразвуковыми преобразователями длиной от 10 до 40 мм.
В настоящее время аналоговые устройства все меньше применяются в практике.
Сканирующие устройства с коммутируемой матрицей имеют блок коммутации 6, управляющее устройство 3. Оно обеспечивает поочередный опрос каждого из элементов матрицы 1. 4 – устройство обработки информации, позволяющее создавать на экране по полученным сигналам изображение исследуемого сочетания объекта.