 2015-09-06
2015-09-06 235
235Таблица 1
| Xa | 0.21068 |
| Ya | 0.12163 |
| Xb | -1.605615 |
| Yb | 1.878083 |
| Xd | -0.075603 |
| Yd | 0.940254 |
| Xe | 1.07041 |
| Ye | 2.26464 |
| ϕ23 | -48.8489445 |
| Cos(ϕ2) | -0.9615854 |
| Sin(ϕ2) | -0.27450601 |
| ϕ2 | -164.067423 |
| Cos(ϕ3) | -0.4260711 |
| Sin(ϕ3) | -0.90468969 |
| ϕ3 | -115.2184777 |
| Cos(ϕ4) | -0.1419344 |
| Sin(ϕ4) | 0.98987606 |
| ϕ4 | 98.15979867 |
| Vxa | -0.095 |
| Vya | 0.164545 |
| Vxb | -0.05548699 |
| Vyb | 0.02613205 |
| Vxd | 0.02688448 |
| Vyd | -0.16439967 |
| Vye | -0.16825453 |
| Vϕ2 | 0.26905095 |
| Vϕ3 | -0.10054527 |
| Vϕ4 | 0.02715944 |
| wxa | -0.164545 |
| wa | -0.095 |
| wxb | -0.17715308 |
| wyb | 0.09024808 |
| wxd | -0.2298075 |
| wyd | 0.35277883 |
| wye | 0.38498485 |
| wϕ2 | -0.339425951 |
| wϕ3 | -0.325771568 |
| wϕ4 | -0.2320521 |
Прототип 2
Исходные данные
На рис. 3.1 показана схема механизма.
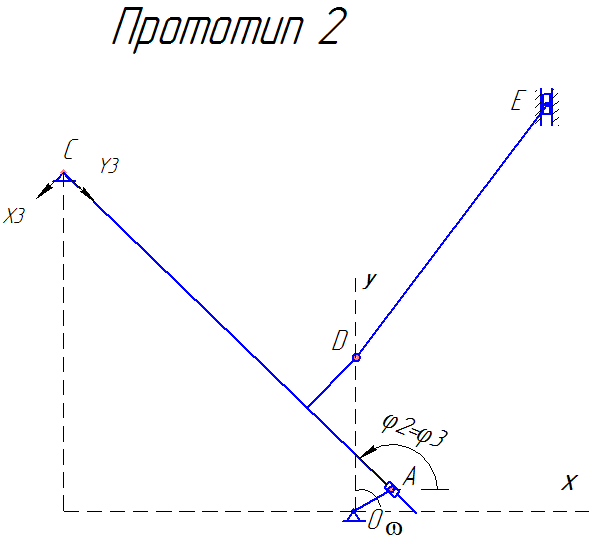
Рис3.1
Исходные данные механизма.
OA= 0.243275м
BC=0.61 м
AB=0.535 м
XC -1.605615м
M1=-1
XE= -1.07041м
DE= 1.75158 м
M2=1
YC= 1.878083м
X2D= 1.75158м
Y2D= 0.38924м
Структурный анализ механизма
Структурный анализ данного прототипа представлен в первой курсовой работе
Геометрический анализ механизма
План 12 положений механизма
На рис.3.3 показаны 12 положений механизма в масштабе
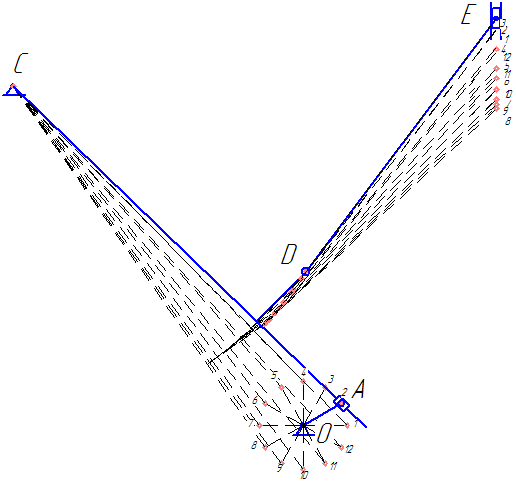
Рис. 3.3
Групповые уравнения и их решения
Решение групповых уравнений представлено в первой курсовой работе
Кинематический анализ механизма
Планы скоростей и ускорений
На рис. 3.4.1 показан план аналогов скоростей для положения 5
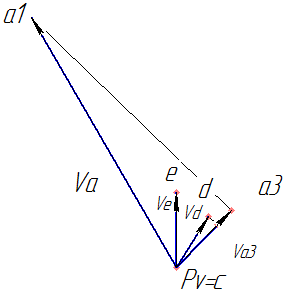
Рис. 3.4.1
На рис. 3.4.2 показан план аналогов ускорений для положения 5
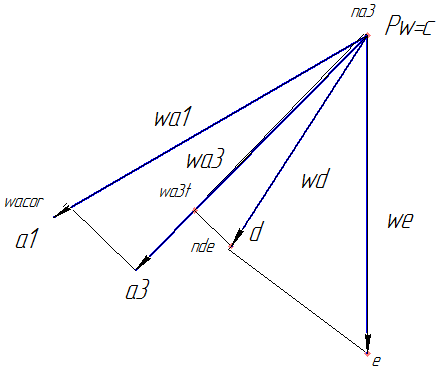
Рис. 3.4.2
На рис. 3.4.3 показан план аналогов скоростей и ускорений для крайнего положения
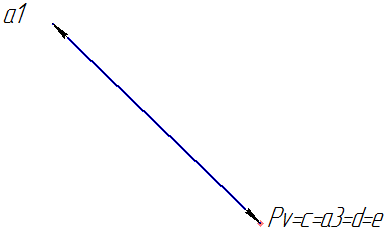
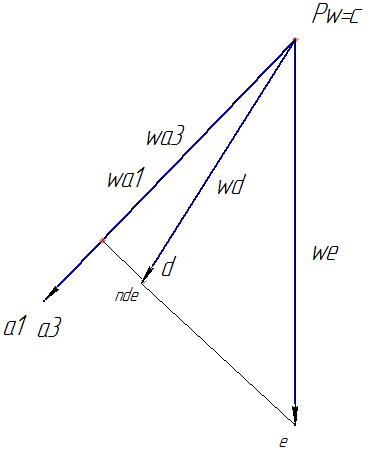
Рис. 3.4.3
Аналитическое определение аналогов скоростей и ускорений представлено в первой курсовой работе








