 2015-09-06
2015-09-06 294
294Исходные данные
На рис.2.1 показана схема механизма.
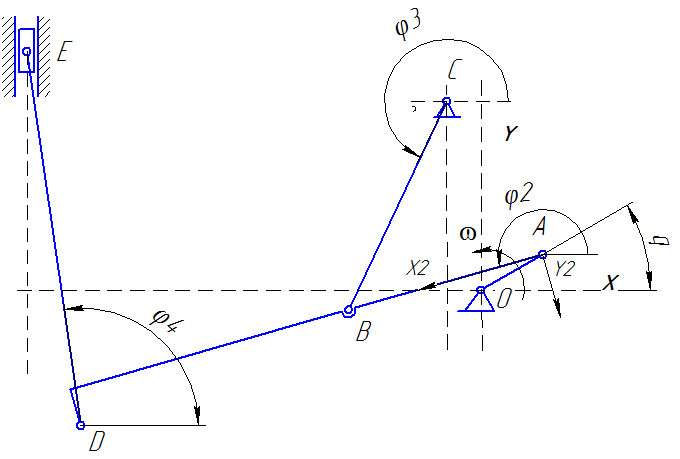
Рис. 2.1
Исходные данные механизма.
OA=0.1849м
BC=0.7398м
AB=0.6165м
XC=-0.3452м
M1=-1
XE=-1.196м
DE=1 м
M2=1
YC=0.6412м
X2D=1.233м
Y2D=0.1233м
Структурный анализ механизма
Целью структурного анализа механизма является определение количества звеньев и кинематических пар, классификация последних, определение подвижности пар и степени подвижности механизма, а также выделение в нем структурных групп кинематических цепей, у которых число входов совпадает с числом степеней подвижности.
Структурный анализ данного прототипа представлен в первой курсовой работе
Геометрический анализ механизма
Целью геометрического анализа рычажного механизма является составление уравнений геометрического анализа, решение их, выделение побочных и основных решений, определяющих положения звеньев, а также исследование функций положения выходных звеньев структурных групп.
План 12 положений механизма
На рис. 2.3.1 показаны 12 положений механизма в масштабе
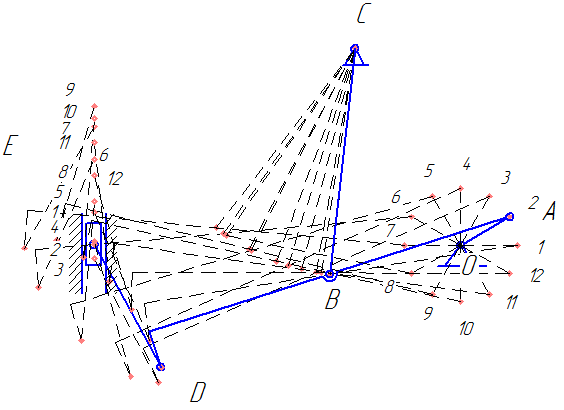
Рис. 2.3.1
Решение групповых уравнений представлено в первой курсовой работе








