 2015-09-06
2015-09-06 2912
2912• Положение материальной точки в пространстве задается радиусом-вектором г:
 |
где i, j, k — единичные векторы направлений (орты); х, у, z — координаты точки.
Кинематические уравнения движения в координатной форме:


где t — время.
• Средняя скорость

где  — перемещение материальной точки за интервал времени
— перемещение материальной точки за интервал времени  .
.
Средняя путевая * скорость

где  — путь, пройденный точкой за интервал времени .
— путь, пройденный точкой за интервал времени .
где  — проекции скорости v на оси координат.
— проекции скорости v на оси координат.
Модуль скорости

 • Ускорение
• Ускорение

где проекции ускорения a на оси
координат.
Модуль ускорения

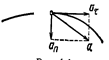 |
При криволинейном движении ускорение можно представить как сумму нормальной  и тангенциальной
и тангенциальной  составляющих (рис.1.1):
составляющих (рис.1.1):

Модули этих ускорений:

где R — радиус кривизны в данной точке траектории.
• Кинематическое уравнение равномерного движения материальной точки вдоль оси х

где  — начальная координата; t — время. При равномерном движении
— начальная координата; t — время. При равномерном движении
v =const и a=0.
• Кинематическое уравнение равнопеременного движения( )вдоль оси x
)вдоль оси x

где v 0 —начальная скорость; t — время.
Скорость точки при равнопеременном движении
v=v 0+a t.
• Положение твердого тела (при заданной оси вращения) определяется углом поворота (или угловым перемещением)  .
.
Кинематическое уравнение вращательного движения

• Средняя угловая скорость

где  — изменение угла поворота за интервал времени . Мгновенная угловая скорость *
— изменение угла поворота за интервал времени . Мгновенная угловая скорость *

• Угловое ускорение *

• Кинематическое уравнение равномерного вращения

где  —начальное угловое перемещение; t— время. При равномерном вращении
—начальное угловое перемещение; t— время. При равномерном вращении  =const и
=const и  =0.
=0.
* Угловая скорость и угловое ускорение являются аксиальными векторами, их направления совпадают с осью вращения.
Частота вращения
n=N/t, или n=1/T,
где N — число оборотов, совершаемых телом за время t; Т — период вращения (время одного полного оборота).
• Кинематическое уравнение равнопеременного вращения ( = const.)

где  —начальная угловая скорость; t— время.
—начальная угловая скорость; t— время.
Угловая скорость тела при равнопеременном вращении
 .
.
• Связь между линейными и угловыми величинами, характеризующими вращение материальной точки, выражается следующими формулами:
путь, пройденный точкой по дуге окружности радиусом R,
s=  R (
R ( — угол поворота тела);
— угол поворота тела);
скорость точки линейная

ускорение точки:
тангенциальное

нормальное









