 2015-10-16
2015-10-16 415
415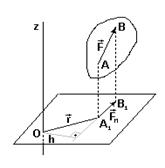 Моментом силы относительно оси называют алгебраический момент проекции этой силы на плоскость, перпендикулярную оси (рис.13), относительно точки пересечения оси с этой плоскостью.
Моментом силы относительно оси называют алгебраический момент проекции этой силы на плоскость, перпендикулярную оси (рис.13), относительно точки пересечения оси с этой плоскостью.
Знак определяется направлением вращения (против часовой стрелки − (+), по часовой стрелки − (−)).
Рис. 13
Замечания: а) Mz=0, если сила параллельна оси Oz.
б) Mz=0, если линия действия пересекает ось Oz.
Момент силы относительно оси равен нулю, если сила и ось лежат в одной плоскости.
1.6. Приведение системы сил к простейшей системе
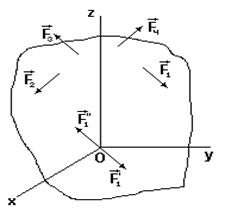 Пусть на тело действует произвольная система сил
Пусть на тело действует произвольная система сил  . Приведем эту систему сил к заданному центру. Выберем произвольную точку О за точку приведения (рис.14).
. Приведем эту систему сил к заданному центру. Выберем произвольную точку О за точку приведения (рис.14).
 Рассмотрим одну из сил системы – F1. Добавим в точке О нулевую систему сил – (F1', F2"). Заметим, что силы (F1, F1") представляют пару сил, которую можно заменить вектором момента пары
Рассмотрим одну из сил системы – F1. Добавим в точке О нулевую систему сил – (F1', F2"). Заметим, что силы (F1, F1") представляют пару сил, которую можно заменить вектором момента пары
Рис.14
M0 (F1), приложенным в точке О (он же равен мо-менту силы F1 относительно центра О), то есть исходная сила эквилентна силе F1' и вектору момента пары, приложенным в той же точке.
 Проведя аналогичную операцию со всеми векторами исходной системы сил, мы получим два пучка векторов, приложенных в точке O – пучок сил
Проведя аналогичную операцию со всеми векторами исходной системы сил, мы получим два пучка векторов, приложенных в точке O – пучок сил  и пучок векторов моментов
и пучок векторов моментов  которые приводятся к эквивалентной системе двух векторов:
которые приводятся к эквивалентной системе двух векторов:
Главным вектором системы сил называют вектор, равный векторной сумме этих сил (вектор R). Значение главного вектора сил не зависит от выбора точки приведения.
Главным моментом системы сил относительно точки О тела называют сумму векторных моментов всех сил системы относительно этой точки (вектор момента результирующей пары М0). Вектор М0 зависит от точки приведения О:

По проекциям сил можно найти модуль главного вектора и главного момента, а также косинусы их углов с осями координат.



Главный момент плоской системы сил перпендикулярен главному вектору.








