 2015-10-16
2015-10-16 1134
1134Стенди для визначення тягових якостей автомобілів проектуються, як правило, звичайно за схемою, представленою на рис. 7.8.
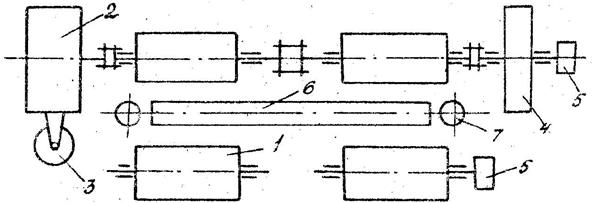
Рис. 7.8. Стенд перевірки потужності двигуна автомобіля:
1 – біговий ролик; 2 – навантажувач; 3 – датчик крутного моменту;
4 – інерційна маса; 5 – тахогенератор; 6 – виштовхувач коліс;
7 – колесо відбійник
Вибір основних геометричних параметрів роликового блоку. Діаметр роликів визначається із залежності
D p = (0,7 … 0,8) · r к, (7.1)
де r к– радіус кочення колеса по роликах.
Величина r кприблизно дорівнює статичному радіусу шини r ст на дорозі. Якщо на стенді перевіряються автомобілі різних марок, приймають r кпо найбільшому колесу. Отриманий діаметр ролика необхідно округлити до найближчого числа з ряду: 240, 320, 370, 400, 475 мм.
Для зручності обробки сигналів датчиків шляху та швидкості бажано, щоб один оберт ролика відповідав шляху автомобіля довжиною в один метр. Тому стенди для діагностування більшості моделей вантажних автомобілів і автобусів мають ролики з діаметром 318 мм. Стенди для легкових автомобілів мають ролики меншого діаметра.
Розрахунок довжини роликів і відстаней між їхніми торцями провадять за схемою (рис. 7.9).
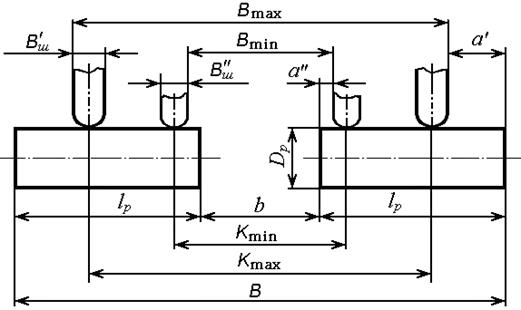
Рис. 7.9. Розрахункова схема вибору параметрів роликового блоку
З геометричних співвідношень знаходять відстані В – між зовнішніми та b – внутрішніми торцями роликів
B = B max + 2 × a′, b = B min–2 × a′′, (7.2)
де B max і B min – відповідно, ширина за зовнішніми границями коліс найбільшого автомобіля й внутрішніх границь коліс найменшого автомобіля;
a′ і a′′ – запас довжини роликів, (звичайно приймають рівним 100…150 мм).
Довжина роликів l p, яка залежить від конструктивних параметрів шин і ступеня універсальності стенда, визначається виразом
 . (7.3)
. (7.3)
Для осей із двоскатними колесами при колії к та ширині профілю шин В ш маємо
B max = K max + В ш; B min = K min – В ш..
Для осей с двоскатними колесами
B max = K max + 2 × В′ ш + 50;
B min = K min – 2 × В′′ ш – 50.
При випробуваннях автомобіля на стенді, якщо неправильно обрана відстань L (рис. 7.10), відбудеться відрив колеса від заднього ролика, тобто автомобіль виїде зі стенда. Щоб цього не відбулося, повинна виконуватися умова
G′ к · φ≤ G′к · sin α+ G к· f + G "к · f р, (7.4)
де φ – коефіцієнт зчеплення коліс із роликами;
f і f р –коефіцієнти опору коченню коліс по поверхні помосту й роликах.
Якщо виразити сили через G к, припустивши, що G′ к≈ G "к, маємо
φ · G к · cos α ≤ G к · sin α + f · G к + f р· G к · cos α. (7.5)
Для сталевих роликів
f ≈ f р · cos α. (7.6)
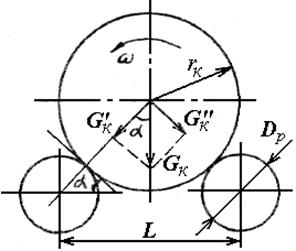
Рис. 7.10. Схема взаємодії колеса й роликів стенда
перевірки потужності
Підставивши вираз (7.6) у рівняння (7.5), і розділивши обидві частини нерівності на G к · cos α знаходимо, що
φ ≤ tg α+ 2 · f рабо tgα ≥ φ− 2 · f р.
З огляду на те, що 2 · f рв 10...15 раз менше φ, приблизно можна вважати, що
tgα ≥ φ. (7.7)
Якщо φ = 0,5, то α ≥ 27 °. (На практиці α = 30 °). Тоді відстань між осями роликів
L = 2 · (r к + r р) · sin α = r к+ r р, (7.8)
де r кта r р – відповідно, радіуси колеса і ролика.
Однак при α ≥ 27 ° стенд повинен бути обладнаний виштовхувачем коліс (рис. 7.11).
Хід підйомника виштовхувача
H = H′ + h,
де H′ = (Rp + Rk) ·(1 – cos α);
h = 20... 30 мм – гарантований зазор (проміжок).
|
|
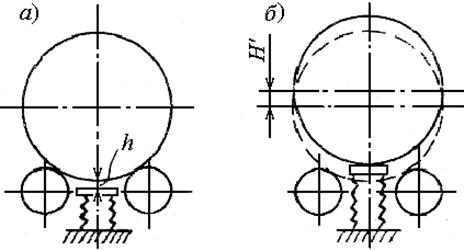
Рис. 7.11. До розрахунку ходу, підйомника:
а – підйомник опущений; б – підйомник піднятий
В якості виконавчих механізмів підйомників можливо використання пнемоподушок підвіски автобусів. Піднімальна сила виштовхувача повинна перевищувати вагу, яка приходиться на колесо. Іноді виштовхувачі конструктивно поєднують із гальмом, що блокує ролики в момент виїзду автомобіля. За цих умов зусилля P на штоку виконавчого механізму
 , (7.9)
, (7.9)
де φ1 – коефіцієнт тертя між гальмовою накладкою й роликом.
З метою зменшення сили P колодки розташовують під деяким кутом відносно вертикальної осі (рис. 7.12). При цьому
 .
.
При розрахунках обирають значення φ = 0,5, а φ1 = (0,28...0,62) залежно від матеріалу фрикційних накладок. Накладки від гальмових механізмів автомобілів, до складу яких входить коротко волокнистий азбест, наповнювачі у вигляді оксиду цинку, залізного сурику й сполучні синтетичні смоли, забезпечують φ1 = 0,3...0,35.
Площа накладки S визначається з урахуванням питомого тиску p 0 у вигляді:
 . (7.10)
. (7.10)
Звичайно приймають p 0=0,15... 0,25 Н/мм2. При значній величині площі необхідно використовувати гальма без накладок. При цьому в розрахунках φ1 = 0,15, а p 0= 50 Н/мм2. У ряді випадків, коли зусилля на виконавчому механізмі виходить занадто великим, використовують спеціальні гальмові пристрої у вигляді зубчатих дисків, що сидять на одному валу з роликом і загальмовувача окремим виконавчим механізмом (рис. 7.12).
|
Рис. 7.12. Варіанти конструкцій гальм роликів:
а – гальмо сполучене з підйомником; б – гальмо виконане у вигляді стопора;
1 – ролик; 2 – фрикційна накладка; 3 – зубчатий диск; 4 – пневмоциліндр
Здебільшого в якості виконавчого механізму використовують гальмові камери автомобілів.
|
За формулою (7.1) обчислюємо діаметр ролика:
Dp = (0,7 … 0,8) · 0,315 = (0,221 … 0,252) м.
Отриманий діаметр ролика округляємо до найближчого рекомендованого
Dp = 240 мм.
Ширина за зовнішніми B max та внутрішніми B min границями коліс автомобіля;
B max = K max + B ш = 1470 + 185 = 1655 мм;
B min = K min – B ш = 1470 – 185 = 1235 мм.
Згідно формул (7.2) визначаємо, відповідно, відстань між зовнішніми B і внутрішніми b торцями роликів, а по формулі (7.3) – довжину роликів l p. Припускаючи, що a′ = a′′ = 100 мм, маємо
B = B max + 2 × a′; B = 1655 + 2 ×100 = 1855 мм;
b = B min – 2 × a′′; b = 1235 – 2 ×100 = 1035 мм;
l p =  мм.
мм.
Обираємо a = 35°, тоді згідно (7.8) міжцентрова відстань L дорівнює
L = 2 · (r к + r р) · sin α; L = 2 × (315 + 120) × sin 35°» 500 мм.
Так як обране значення кута a більше 27°, тому даний роликовий блок повинен бути оснащений виштовхувачем.
Контрольні запитання
7.1. Як визначити для заданого автомобіля кількісні значення всіх
діагностичних параметрів, що визначають його тягові якості?
7.2. Яке обладнання використовується в підприємствах автомобільного транспорту для визначення тягових властивостей автомобілів?
7.3. Який принцип роботи обладнання для визначення тягових властивостей автомобілів?
7.4. Чим принципово відрізняються схеми інерційного й силового стендів для визначення тягових властивостей автомобілів?
7.5. Яке призначення всіх пристроїв динамічного роликового стенда М-108?
7.6. Як здійснюється енергоживлення роликового стенда М-108 при випробуванні тягових і гальмівних характеристик?
7.7. Як працює стенд М-108 в автоматичному режимі?
7.8. Які види випробувань автомобілів можна проводити на динамічному роликовому стенді М-108?
7.9. Чому живлення стенда М-108 не може підключатися до електричних мереж пов’язаних з мережами житлових будинків?
 |








