 2015-10-13
2015-10-13 1132
1132Основным назначением систем автоматики и телемеханики является замена человеческого труда машинным.
В своей практической деятельности человек сталкивается с тем или иным устройством, процессом, мысленно выделяя его из окружающей среды. При таком выделении наблюдаемого можно отметить некоторые объекты наблюдения (исследования). Указанные объекты подвергаются воздействиям со стороны окружающей среды и сами оказывают воздействия на нее. Если некоторые воздействия объекта на окружающую среду представляют какой-либо интерес, и мы желаем, чтобы эти воздействия имели определенный характер или изменялись по определенным законам, то указанный объект наблюдения выступает уже как объект управления (ОУ).
Понятно, что класс объектов наблюдения шире класса объектов управления, поскольку некоторые наблюдаемые объекты могут оказаться неуправляемыми или не подлежащими управлению. Однако, если не рассматривать вообще неуправляемых объектов, то оба эти класса совпадают, и различие в терминологии соответствует лишь различным этапам практической деятельности человека, которая укладывается в ленинскую формулу: «От живого созерцания — к абстрактному мышлению, и от него — к практике».
Объемами управления могут быть как технологические процессы и технические устройства, так и объекты живой природы, включая самого человека и человеческое общество.
Объекты управления (ОУ) обычно обозначают вместе с представляющими практический интерес переменными у 1,..., уk (выходными или регулируемыми переменными) и с воздействиями на объект х 1 ,..., х i (входными воздействиями), которые могут влиять на переменные Y=(y 1, …, y k)(рис. 1-1,а). Те воздействия, которые можно изменять произвольно, хотя бы и в некоторых пределах, называют
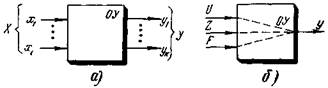
Рис. 1-1 а —входные и выходные воздействия объекта; б — классы входных воздействий
управляющими воздействиями U=(и 1,..., ип), или коротко — управлениями, а внешние независимые воздействия называют возмущениями. Последние делятся на контролируемые Z=(z1..., zr) и неконтролируемые возмущения F =(f1, f2, …) (рис. 1-1,б). Точное число неконтролируемых возмущений может быть неизвестно. Рассмотрим несколько объектов управления.
Пример 1-1. Электрический привод двухкоординатного фрезерного станка.
Здесь можно наметить следующие выходные переменные:
у1 — скорость вращения фрезы;
y2, y3 — перемещение фрезы по одной и другой координатам.
Управляющие воздействия:
и1 — напряжение на управляющей обмотке приводного
двигателя фрезы;
u2, u3 — напряжения на управляющих обмотках двигателей, осуществляющих перемещение стола станка по двум осям.
Контролируемые воздействия:
z1, z2 - частота и напряжение в электрической сети,
Неконтролируемые воздействия:
f1 — износ фрезы;
f2 — изменение твердости обрабатываемого материала;
f3, f4,... — износ механизмов станка, его электрических элементов и т. д.
Пример 1-2. Электрическая нагревательная печь может быть охарактеризована следующими переменными:
у1 — температура помещенной в печь заготовки (для простоты можно не интересоваться пространственным распределением температуры);
и1 — количество подводимой к печи электроэнергии;
z1 — напряжение сети;
z2 — объем или вес заготовки;
f1 — изменение теплоизоляции печи (износ и выгорание
футеровки и т. п.);
f2 — изменение теплоемкости заготовок в зависимости от колебаний свойств материала и т. д.
При автоматическом управлении (без участия человека) функции изменения управляющих воздействий ОУ принимает на себя управляющее устройство УУ (регулятор). Совокупность объекта управления и управляющего устройства образует систему автоматического управления (регулирования) (САУ или САР), блок-схема которой в общем случае имеет вид рис. 1-2,а, где Y 0 — желаемый характер изменения выходных переменных ОУ (вектор уставок, задающих воздействий) отражает цель управления.
Для того чтобы понять, какие функции приходится выполнять УУ в САУ, рассмотрим признаки воздействия:
1) энергетический, характеризующий способность воздействия нести энергию; он важен при получении, преобразовании и передаче энергии;
2) метаболический, характеризующий материальную сторону воздействия; он важен при преобразовании вещества, его количества, формы и положения;
3) информационный, характеризующий способность воздействия быть носителем информации.
Воздействия, несущие информацию, называют сигналами. Сигнал обычно характеризуют в виде некоторой функции времени.
В теории систем автоматического управления и связи важна только третья, информационная сторона воздействий. Поэтому ясно, что основной функцией УУ в САУ является преобразование и обработка информации об объекте управления с целью определения законов управления объектом. Таким образом, как показано на рис. 1-2,а, на вход УУ поступает информация о действительном состоянии объекта,
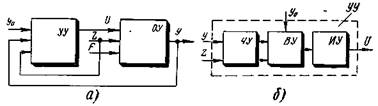
Рис 1-2 а — структура системы автоматического управления, б — структура управляющего устройства
характеризуемом переменной Y, информация о желаемом состоянии объекта Y 0 и информация о действующих на объект возмущениях Z. Поскольку воздействия Y и Z могут иметь различную физическую природу (см. примеры 1-1, 1-2), то вначале необходимо их преобразовать в величины, удобные для обработки в вычислительном устройстве ВУ (рис. 1-2,6). Такими преобразователями являются чувствительные элементы — датчики, совокупность которых образует чувствительное устройство (ЧУ).
Вычислительное устройство по поступающей в него информации формирует законы управления по правилам (алгоритмам), которые в него заложены конструктором. Найденные законы управления преобразуются в различные по физической природе управляющие воздействия с поощью исполнительных устройств (ИУ).
Далее будут рассмотрены только системы регулирования одной величины у (одномерные САР).
В зависимости от желаемого характера изменения регулируемой переменной различают:
а) системы автоматической стабилизации, в которых регулируемая величина должна поддерживаться постоянной  ;
;
б) системы программного регулирования, в которых регулируемая величина должна изменяться по заранее известному закону  ;
;
в) следящие системы, в которых регулируемая величина должна изменяться по заранее неизвестному закону  ;
;
г) система экстремального регулирования, в которых регулируемая величина должна поддерживаться максимальной (или минимальной)  (min), причем это значение может быть заранее неизвестным.
(min), причем это значение может быть заранее неизвестным.
В связи со стремлением наилучшим образом управлять объектами привлекательна задача создания оптимальных САР, выполняющих свои функции наилучшим образом с точки зрения выбранного критерия качества. Поскольку условия работы САР могут меняться в зависимости от возмущении на ОУ, то может оказаться, что оптимальная САР также должна менять во времени характеристики своего УУ (например, изменять алгоритму управления или параметры этих алгоритмов). Обычно в САР не заложена возможность автоматически изменять характеристики УУ однако в последние годы большое внимание привлекают адаптивные САР (самонастраивающиеся системы автоматического управления), которые автоматически изменяют (настраивают) характеристики УУ таким образом; чтобы работа САР, оцениваемая по выбранному критерию качества, была наилучшей [1].








