 2015-10-22
2015-10-22 713
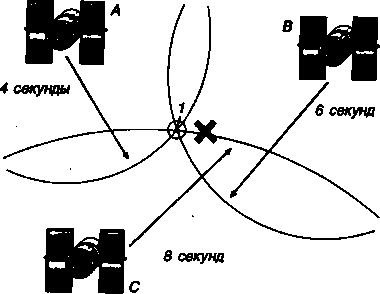
713Если к этим построениям добавить еще одно измерение, что в двухмерном пространстве означает измерение расстояния до спутника С, равного, скажем, 8 с, то все три точных измерения дадут положение искомой точки 1 на пересечении трех соответствующих окружностей (рис. 21.7).
Если учесть, что часы приемника несколько отстают, то в результате трех неточных измерений будут получены три возможных местоположения одной искомой точки (точки 2, 5 и 4\ которая может одновременно находиться на расстояниях 5, 7 и 9 с соответственно от спутников А, В и С, что физически невозможно (рис. 21.8).
|
| Р и с. 21.7. Определение местоположения точки / на плоскости по трем точным измерениям |
Штриховые окружности на рисунках соответствуют не истинным дальностям, а так называемым «псевдодальностям», т. е. расстояниям, измеренным по неточным часам приемников «ОР8». Если начать изме-

Рис. 21.8. Определение местоположения точки на плоскости по трем неточным
измерениям: / — точное местоположение точки; 2,3,4 — варианты ошибочного определения
Местоположения
нять ошибочные расстояния с некоторым одинаковым шагом (в данном случае уменьшать), то можно в конце концов прийти не к трем, а к единственному правильному решению в точке 7. Точное местоположение точки 1 можно также установить решив систему из трех уравнений с тремя неизвестными (правильными расстояниями до спутников). Таким образом, в двумерном пространстве (на плоскости) три неточных измерения дают тот же точный результат, что и два точных измерения.
Программное обеспечение компьютеров приемников «ОР8» построено таким образом, что когда в них поступают измерения, не дающие пересечения в одной точке, то в результате решения по меньшей мере четырех уравнений с четырьмя неизвестными (для трехмерного пространства) находится единственная точка, соответствующая исправленным значениям расстояний до четырех навигационных спутников, т. е. таким образом устраняется неточность хода часов приемника.
Для определения точного местоположения искомой точки в трехмерном пространстве требуется по меньшей мере четыре неточных измерения расстояний (псевдодальностей) до четырех навигационных спутников.
Для определения с необходимой точностью местоположения точек, в системах «ОР8» учитывают и другие возможные источники ошибок.
Поскольку в системах «ОР8» навигационные искусственные спутники Земли используются как точки отсчета (т. е. как подвижные пункты геодезической сети), то орбиты спутников и местоположение каждого из
них на орбитах (эфемериды) должны быть в любой момент времени точно известны. Поэтому каждый приемник «ОР8» содержит в памяти своего компьютера «альманах», т. е. непрерывно обновляемый справочник, из которого может быть определено точное местоположение любого спутника орбитального комплекса на любой момент времени.
Незначительные отклонения местоположения навигационных спутников от теоретических орбит (ошибки эфемерид), связанные с влиянием гравитационного поля Солнца и Луны, а также давления солнечного света, обнаруживаются наземными контрольными станциями слежения. Вычисленные поправки к орбитам передаются обратно на спутники, заменяя собой прежнюю информацию в памяти бортовых компьютеров. Спутники помимо непрерывной подачи кодовых радиосигналов ежеминутно передают на Землю поправки к своему орбитальному положению, обновляя альманахи каждого приемника «ОР8».
И наконец, в системах «ОР8» учитывают погрешности, связанные с задержками прохождения радиосигналов через ионосферу и тропосферу Земли. Эти погрешности учитывают либо введением усредненных поправок, либо использованием специальных приемников, работающих на двух радиосигналах разной частоты. В последнем случае ионосферные и тропосферные задержки прохождения радиосигналов определяются непосредственно в ходе измерений, поскольку они обратно пропорциональны квадрату частоты радиоизлучения.
Необходимость для определения местоположения точек измерения расстояний по меньшей мере до четырех навигационных спутников, необходимость учета разнообразных погрешностей измерения расстояний, а также назначение производимых измерений предопределили большое разнообразие конструкций приемников «ОР8».
ПРИЕМНИКИ «СР8»
Все, получившие распространение в практике производства инженерных работ приемники, можно условно разделить на две обширные группы.
К первой группе относят приемники, работающие по принципу последовательного (поочередного) отслеживания и измерений расстояний до навигационных спутников рабочего созвездия.
Ко второй группе — приемники, отслеживающие и обеспечивающие измерение расстояний одновременно до четырех и более навигационных спутников, т. е. ведущие измерения параллельно.
Внутри каждой из этих двух групп существует большое разнообразие СР8-приемников различного назначения и конструктивных особенностей.
Одноканальные приемники, наиболее экономичные и дешевые, используют в тех случаях, когда не требуется вести измерения «в режиме реального времени», т. е. непрерывно и не требуется измерения скорости объекта, на котором установлен приемник. Прежде чем вычислить координаты местоположения, одноканальныи приемник должен выполнить последовательно четыре отдельных измерения до четырех различных спутников. Вся операция по определению координат одной точки может занимать от 2 до 30 с, что во многих случаях может оказаться вполне приемлемым.
Тем не менее одноканальным приемникам свойственны некоторые недостатки:
с помощью такого приемника нельзя производить измерения с подвижного объекта (например, с автомобиля при кинематической съемке плана и продольного профиля автомобильной дороги);
в ходе каждого цикла из четырех измерений приемник должен оставаться неподвижным;
работа одноканальных приемников по определению координат прерывается в моменты, когда навигационные спутники передают свои информационные сообщения, прием и расшифровка каждого из которых занимает около 30 с.
Двухканалъные приемники работают по следующему принципу. Когда один канал приемника производит обработку результатов временных измерений до одного спутника, другой канал устанавливает радиоконтакт с очередным спутником для проведения измерений. Закончив цикл частичной обработки данных, первый канал мгновенно переключается на измерения до очередного спутника без потери времени на его «захват» и «прослушивание». Тем временем второй канал, называемый административным, обращается к следующему спутнику и т. д. Административный канал используется для приема информационных сообщений спутников без прерывания процесса определения координат местоположения и может быть использован для обработки временных измерений. Кроме того, современные двухканальные приемники программируются для слежения за более чем четырьмя спутниками и в тех случаях, когда за одним из рабочих спутников оказывается потерян контроль, мгновенно используется другой, без перерыва процесса определения координат. Все это существенно ускоряет работу приемников.
Многоканальные приемники (непрерывного слежения). Такие приемники одновременно отслеживают 4 и более спутников. Многоканальные приемники, используемые при производстве инженерно-геодезических работ, могут иметь 4, 6, 8, 10, 12 и даже 24 канала слежения. Кроме очевидного преимущества — непрерывного определения координат в режиме реального времени, скорости и траектории движения, многоканаль-

|

|
| ные приемники могут обрабатывать сигналы всех спутников рабочего созвездия, видимых в настоящий момент на небосклоне, а некоторые приемники одновременно и спутников разных орбитальных систем: NАV8ТАI^ (США) и ГЛОНАСС (Россия). Одночастотные и двухчастотные приемники. Кроме приемников (одно/двухканальных и многоканальных), работающих на одной частоте радиоволн в практике инженерно-геодезических работ используют и многоканальные двухчастотные приемники, работающие с использованием кодов на двух частотах: 1575,72 МНх и 1227,6 МНх. Приемники такого уровня обеспечивают более точное определение координат точек местности, в связи с возможностью дифференцированного учета для каждого рабочего спутника ионосферных и тропосферных задержек, а также обеспечивают быструю инициа- |
| Рис. 21.9. Одночастотный 12-канальный СР8-приемник навигационного класса точности «Еа&1е Ехр1огег» |
лизацию (присваивание начальных значений) приемника, что особенно актуально в местах, где могут часто блокироваться сигналы спутников.
По точности определения координат и назначению различают приемники следующих классов:
навигационного класса с точностью определения координат 150—200 м;
класса картографии и ГИС с точностью определения координат 1—5 м; геодезического класса с точностью определения координат до 1 см.
Приемники навигационного класса дешевы и компактны (рис. 21.9).
Приемники навигационного класса точности призваны решать главным образом навигационные задачи на транспорте, в народном хозяйстве (например, при поиске полезных ископаемых и т. д.) и отдыхе. 280








