 2017-11-30
2017-11-30 4607
4607Геометрический шаг винта (H) — расстояние, проходимое ВВ за один оборот в твердой среде.
H = 2 π r tg φ; (11.2.)
Поступь винта (На) - расстояние, проходимое ВВ за один оборот в воздухе
На = V / nсек; (11.З.)
где: V - скорость полета;
nсек - частота вращения ВВ в секунду.
Относительная поступь (λ)
λ = Ha / D = V / D nсек (11.4)
скольжение (S) - разность между геометрическим шагом и поступью.
S =Н - На = Н – V / D nсек (11.5.)
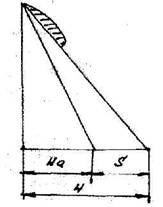
Рис. 11.4. Кинематические характеристики ВВ.
Аэродинамические силы ВВ. (Рис. 11.5.) Лопасть винта находится под воздействием:
- окружной скорости U;
- поступательной скорости V;
- результирующей скорости W;
Эти скорости образуют треугольник скоростей со следующими углами: угол, заключенный между результирующей скоростью W и хордой элемента лопасти называется углом атаки α;

Рис.11.5. Аэродинамические силы элемента лопасти.
- угол заключенный между плоскостью вращения (окружной скоростью и) и хордой элемента лопасти называется углом установки лопасти φ. При обтекании лопасти воздушным потоком на каждом элементе лопасти возникает полная аэродинамическая сила элемента лопасти ΔR.
При разложении этой силы ΔR на составляющие получаем:
- в направлении параллельном оси вращения ВВ - элементарную силу тяги (ΔР);
- в направлении противоположном вращению ВВ - элементарную силу - силу сопротивления (ΔХ).
Сумма элементарных сил тяги составляет силу тяги винта и определяется по формуле:
P=αρn2D4 (11.6.)
где: α- коэффициент тяги, учитывающий форму профиля лопасти, относительной поступи и т.д.
ρ - плотность воздуха;
D - диаметр винта;
n - частота вращения.
На самолете Ан-2 при работе на земле, на взлетном режиме тяга винта составляет 1500 кгс., АВ-2 - 1850 кгс., В.509-Д-94 - 1600 кгс.
Сумма элементарных сил сопротивления винта составляют силу сопротивления вращению лопасти винта (X).
Сила сопротивления на плече r создает момент реактивный Мреакт винта (рис.11.6).
Мреак = Хвр.л. r k (11.7.)
где: Хвр.л. - сопротивление лопасти;
r - радиус точки приложения силы;
k - количество лопастей.
Крутящий момент Мкр - затрачивается на преодоление момента сопротивления винта Мреакт, т.е. Мкр = Мреакт
Мкр =716,2(N/n) (11.8.)
где: N - мощность двигателя;
n - частота вращения;
Мкр - крутящий момент двигателя.
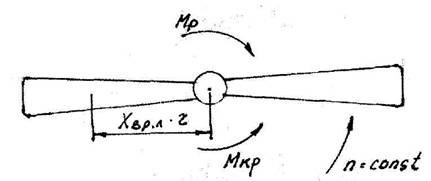
Рис.11.6. Аэродинамические силы и моменты ВВ.
Тяга ВВ. Влияние скорости полета, частоты вращения, высоты полета, угла установки лопасти φ на силу тяги ВВ.
Скольжение и поступь характеризует способность создавать тягу ВВ. На скорости равной нулю скольжение максимально и тяга ВВ максимальна. С увеличением скорости полета скольжения уменьшается и уменьшается тяга ВВ.
Положительное скольжение - положительная тяга. На больших скоростях скольжение может стать отрицательным, т.е. ВВ проходит расстояния больше чем его геометрический шаг. Отрицательное скольжение - отрицательная тяга.
При скольжении S = 0 воздух не отбрасывается, тяга равна нулю. Отсюда следует, что с увеличением скорости полета угол атаки лопастей все время уменьшается, а сила R изменяет свою величину и направление, все время поворачиваясь против часовой стрелки таким образом, что ее составляющая сила тяги Р - уменьшается до нуля, а затем ставится отрицательной т.е. при работе винта на месте угол атаки α максимальный и тяга максимальная, при увеличении скорости полёта тяга уменьшается (рис.11.7).
Влияние частоты вращения ВВ на тягу винта видно из формулы (11.6.), где тяга пропорциональна квадрату частоты вращения винта, но это справедливо только до того, как скорость обтекания лопасти достигнет местной скорости звука (Рис.11.10.).

Рис. 11.7. График зависимости тяги ВВ от скорости полёта.
Если самолет летит с постоянной скоростью, а частота вращения винта увеличивается то скольжение увеличивается, углы атаки растут, растёт и тяга (рис.11.8.).
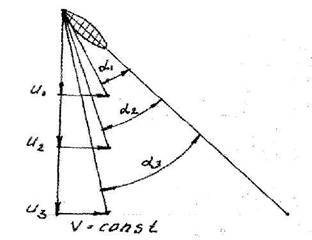
Рис. 11.9. График зависимости силы тяги ВВ от высоты полета.
С увеличением высоты полета, в связи с уменьшением массовой плотности воздуха аэродинамические силы, а в частности, тяга ВВ уменьшается (Рис.10.9) Зависимость угла атаки, а значит и тяги ВВ от угла установки прямая -увеличение угла установки φ, увеличивает α и Р винта.
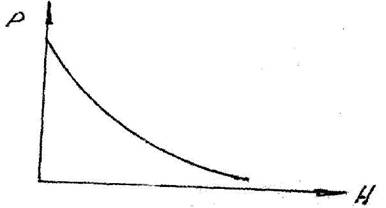
Рис. 11.8. Изменение угла атаки в зависимости от увеличения nсекВВ.
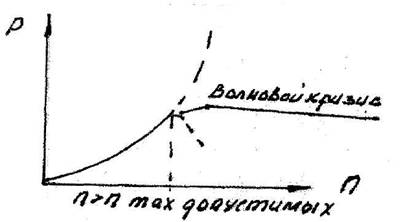
Рис. 11.10. График зависимости Р от частоты вращения ВВ.
Полезная мощность ВВ.
Полезной мощностью (тяговой мощностью) называется работа силы тяги за одну секунду.
Aceк=Nтв =PV; (11.9.)
где: Асек - работа силы тяги;
Nтв - полезная мощность (тяговая мощность) винта;
Р - сила тяги винта; V - скорость самолета.
Мощность, развиваемая винтом, называется полезной потому, что она затрачивается на полезную работу - передвижение самолета в воздухе.
Из формулы (11.9.) видно, что при V=0, полезная мощность (тяговая мощность) равна нулю N=0, при определенной скорости называемой расчетной, произведение PV максимальное, при дальнейшем увеличении скорости полета, тяга падает до нуля и на этой скорости полезная мощность равна нулю.
При постоянной скорости полёта и увеличении частоты вращения ВВ увеличивается тяга (Рис.1.8) и полезная мощность воздушного винта, при уменьшении частоты вращения ВВ тяга и полезная мощность уменьшается.
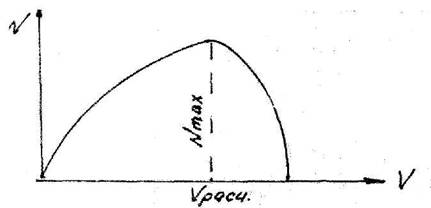
Рис.11.11. График зависимости полезной мощности от скорости полёта.
Мощность, потребная на вращение винта. Мощность, необходимая для преодоления работы сил сопротивления вращению винта за единицу времени называется мощностью, потребной на вращение винта.
NП.B.=KXвU (11.10.)
где: Хв - сила сопротивления вращению лопасти винта;
U - окружная скорость;
К - количество лопастей винта.
Для данного винта мощность потребная на вращение Nп.в. зависит от:
- скорости полета;
- высоты полета;
- частоты вращения ВВ;
С увеличением скорости полета, угол атаки лопастей уменьшается, поэтому сопротивление Хв и потребная мощность NН.B. также уменьшается. С увеличением частоты вращения ВВ, при постоянной скорости полёта, окружная скорость увеличивается, увеличиваются и углы атаки лопастей, поэтому увеличиваются сопротивление винта и мощность потребная на вращение винта. С увеличением высоты полета плотность воздуха уменьшается, а следовательно уменьшается сопротивление и потребная мощность.
Мощность, которая снимается с носка вала называется эффективной мощность Ne. Для того, чтобы при определенной V и Н двигатель поддерживал постоянную частоту вращения необходимо, чтобы эффективная мощность двигателя была равна мощности, потребной на вращение винта.
Ne= NН.B. (11.11.)
Коэффициентом полезного действия ВВ. Коэффициентом полезного действия (КПД) винта называется отношение полезной мощности (тяговой мощности) винта к эффективной мощности двигателя
ηв = NTB/Ne; (11.12.)
Максимальный КПД современных винтов равен 0,8÷0,9.
На КПД ВВ влияют пpoфиль и форма лoпacти в плане. Больший КПД имеют тонкие симметричные профили с симметричной формой лопасти в плане т.к. у таких лопастей профильное и индуктивное сопротивление меньше, чем у толстых профилей. На КПД ВВ также влияют скорость, высота полета и частота вращения ВВ. При изменении скорости, высоты полета и частоты вращения ВВ, но при постоянной эффективной мощности двигателя, КПД винта меняется также как и полезная мощность винта (из Рис.10.11) При увеличении скорости полета от 0 до расчетной скорости КПД (рис.11.12) растет за счет увеличения относительной поступи λ, при увеличении скорости выше V расчетной, КПД падает в результате возрастания волновых потерь на концах лопасти и падения силы тяги. Увеличение КПД на больших скоростях полёта можно добиться увеличением Мкрит лопасти и уменьшением частоты вращения ВВ. Мкрит лопасти увеличивается за счет уменьшения относительной толщины профиля лопасти, для чего делают широкие, прямоугольные концы лопастей. Возможно придание лопасти саблевидной формы в плане. В этом случае лопасть работает аналогично стреловидному крылу.
Для уменьшения скорости обтекания лопасти уменьшают частоту вращения ВВ, чем добиваются уменьшения волнового сопротивления. Для этой цели применяются редукторы, которые уменьшают частоту вращения винта, не меняя частоту вращения двигателя. Для предотвращения падения тяги с увеличением скорости полёта применяют винты изменяемого шага о которых речь пойдёт в дальнейшем.
Работа винта фиксированного шага (ВФШ) на различных режимах.
При постоянной частоте вращения винта мощность двигателя Ne равна мощности потребной на вращение винта NН.B.. При увеличении скорости полёта Ne и NН.B. меняются. Эффективная мощность поршневых двигателей с увеличением скорости полета немного увеличивается, (Рис.11.13) а мощность потребная на вращение винта с увеличением скорости, уменьшается т.к. уменьшаются силы сопротивления вращению винта (уменьшается угол атаки а винта и, следовательно, индуктивное сопротивление.)
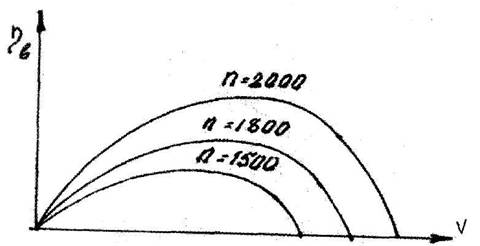
Рис. 11.12. График зависимости КПД винта фиксированного шага от V и n сек.
Мощность потребная для вращения винта с поднятием на высоту уменьшается пропорционально массовой плотности воздуха. При анализе двух графиков (рис.11.14.) видно, что винт и двигатель соответствуют друг другу на одной расчетной высоте Нрасч. На меньших и больших высотах винт оказывается «тяжелым».
Для анализа совместной работы винта и двигателя совместим графики (11.13) Ne= f (V) и NН.В.= f (V). Из графика (рис.10.13.) видно, что только на расчетной скорости Vрасч винт фиксированного шага и двигатель соответствуют друг другу, т.е. Ne =NН.В.
При уменьшении скорости полета винт требует большую мощность для вращения, чем ему может дать двигатель. Это приводит к уменьшению частоты вращения винта. Такой винт называется «тяжелым». На скорости большей Vрасч винт требует меньшей мощности, чем развивает двигатель, поэтому идет увеличение частоты вращения, т.е. винт становится «легким».
При увеличении высоты полета эффективная мощность до расчетной высоты увеличивается, а затем уменьшается. На самолете Ан-2 расчетная высота 1500м мощность у земли номинальная 606,8 кВт (820л.с.) на расчетной высоте 621,6 кВт (840 л.с.)
Таким образом, видно, что ВФШ обеспечивает равенство Ne и NН.В. только на одной высоте и скорости т.е. на одном расчетном режиме полета. Применение такого винта на современных самолетах нецелесообразно. Устраняется этот недостаток применением винтов изменяемого шага (ВИШ).
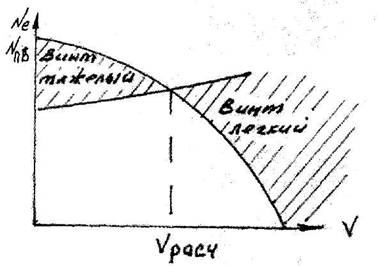
Рис. 11.13. К объяснению совместной работы ВФШ и двигателя.
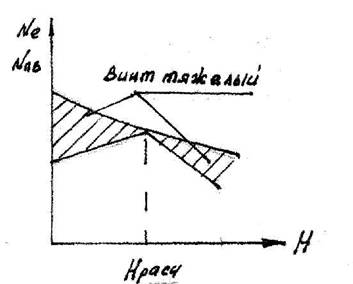
Рис. 11.14. График зависимости N потребного для вращения винта от высоты полёта.
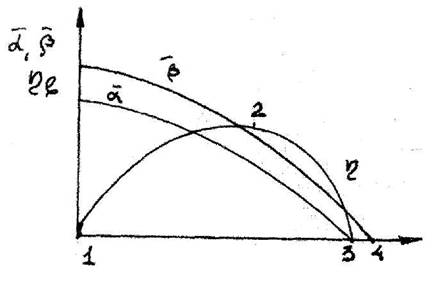
Рис. 11.15. Рабочие характеристики ВФШ.
Винты фиксированного шага (ВФШ) имеют несколько характерных режимов работы (рис.11.15.) К ним относятся:
- режим максимальной тяги (точка 1) Скорость ровна нулю, угол атаки равен углу установки, тяга максимальна;
- режим положительной тяги (точки 1-3). Угол атаки α - положительный, тяга положительна;
- режим нулевой тяги (точка 3). Небольшой отрицательный угол атаки, тяга отрицательна, вся мощность идет на преодоление тормозящего момента;
- режим авторотации (правее точки 4) угол атаки α - отрицателен, тяга Р - отрицательна, мощность потребная на вращение ровна нулю. Винт потребляет энергию от набегающего воздушного потока и в результате этого происходит раскрутка винта. Этот режим опасен тем, что под действием набегающего потока превышение предельной частоты вращения винта может вызвать поломку двигателя
Принцип работы винта изменяемого шага (ВИШ).Принцип работы ВИШ состоит в том, что винт связан с работой регулятора постоянства оборотов (РПО), который автоматически меняет угол установки лопастей в полете, в результате этого меняется угол атаки и мощность потребная для вращения ВВ. Изменение угла установки производится с таким расчетом, чтобы при новом значении скорости полёта V и угла атаки α, мощность потребная на вращение винта была равна эффективной мощности на данной высоте и скорости, при этом увеличение угла установки φ считается переводом винта на «большой шаг», уменьшение φ - перевод на «малый шаг».
По принципу перевода лопастей на новый установочный угол φ винты делятся на прямую, обратную и двойную схемы.
Прямая схема: винт переводится на малый шаг под действием масла а на большой шаг - под действием центробежных сил.
Обратная схема: перевод винта на малый шаг производится под действием центробежных сил, на большой шаг - под действием масла. Эта схема в практике не встречается т.к. в случае отказа РПО произойдет раскрутка винта.
Двойная схема - перевод на большой и малый установочный угол производится под действием центробежных сил и масла.
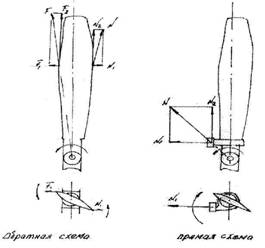
Рис. 11.16. Схемы перевода угла установки φ лопастей.
На самолёте Ан-2 применяются винты АВ-Г и АВ-7Н-161 - двойная схема и В509-Д-9А - прямая схема.
Применение ВИШ уменьшает длину разбега (l) и увеличивает вертикальную скорость набора (Vy) высоты, увеличивает потолок самолета, увеличивает платную загрузку на 15%, увеличивает дальность и продолжительность полета на 20%.
Работа и управление винтом изменяемого шага (ВИШ) на различных режимах полета.
- На взлете устанавливается малый шаг для того, чтобы винт не был тяжелым и двигатель мог развить частоту вращения винта соответствующему взлётному режиму.
- На разбеге по мере роста скорости и уменьшения угла атаки РПО переводит угол установки на увеличение угла установки φ, в результате этого увеличивается угол атаки лопастей и, следовательно, увеличивается потребная мощность на вращение винта, при этом угол атаки α будет несколько меньше исходного.
- Набор высоты. В этом случае устанавливается наивыгоднейшая скорость, а затем наивыгоднейшая частота вращения винта для получения наибольшей мощности. До расчетной высоты эффективная мощность N l увеличивается, а мощность потребная для вращения винтаNa.B уменьшается, но частота вращения винта остается постоянной т.к. РПО переводят лопасти большие углы атаки.
- Горизонтальный полет. РПО сохраняет частоту вращения винта nсек постоянной.
- Расчетные высота и скорость. РПО устанавливает лопасти на большой шаг и при максимальном установочном угле φ ВИШ работает как ВФШ.
- Заход на посадку. Устанавливается малый шаг для улучшения условий ухода на второй круг.
Во избежание детонации двигателя требуется соблюдать следующее правило управлением силовой установкой:
- При увеличении мощности двигателя, установить обороты, затем наддув.
- При уменьшении мощности двигателя уменьшить наддув и установить обороты.
Сопротивление винта при отказе двигателя.
При отказе двигателя на самолете Ан-2 сопротивление винта увеличивается. Если винт переходит на авторотацию, то частота вращения винта падает, что приводит к возникновению отрицательных углов атаки на лопастях винта, что может привести к отрицательной тяге. Сопротивление винта снижает качество самолета. Величина сопротивления зависит от:
- угла установки лопастей;
- скорости полета;
- авторотирует или остановлен винт;
При снижении на средних скоростях авторотирующий винт имеет меньшее сопротивление, чем остановленный.
При снижении на малых скоростях (на посадке) авторотирующий винт имеет большее сопротивление.
-Сопротивление винта остановленного на малом шаге, больше чем у винта на большом шаге на 40-50%.
-Для достижения большой дальности при отказе двигателя лопасти винта должны быть установлены на большой шаг.
Скорость планирования наивыгоднейшая V=160 км/час. Скорость планирования экономическая V=140км/ч.
Влияние работы винта на аэродинамические характеристики самолёта. Наибольшее влияние на улучшение аэродинамических характеристик самолёта оказывает двигатель на максимальном режиме работы и на большом угле атаки крыла.
В условиях когда на углах атаки выше наивыгоднейшего винт работает в условиях косой обдувки сила тяги винта делится на две составляющие одну из которых Pq расходуется на преодоление сопротивления самолета, а другая Ру действует по направлению подъемной силы, увеличивая ее.
При работе винта аэродинамические силы самолета увеличиваются за счет увеличения местной скорости обтекания частей самолета на величину скорости струи отбрасываемой винтом. Качество самолета при этом практически не меняется т.к.лобовое сопротивление и подъёмная сила меняются пропорционально квадрату скорости набегающего потока. Меняется аэродинамические характеристики самолета за счет увеличения подъемной силы крыла на величину составляющей Ру.
При работе винта:
- коэффициент Су резко увеличивается с увеличением углов атаки;
- чем больше режим работы двигателя, тем большее влияние оказывает на прирост Су составляющая тяги двигателя Ру;
- увеличение Сх происходит значительно меньше чем Су.
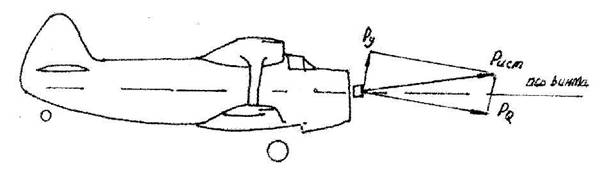
Рис. 11.17. Влияние косой обдувки винта на подъёмную силу крыла.
Улучшение аэродинамических свойств самолета Ан-2 за счет работы силовой установки позволило уменьшить скорость отрыва, длину разбега и взлетную дистанцию.
Особенности устройства ВИШ самолетов с ТВД Винты самолетов с ТВД должны иметь следующее дополнительные устройства:
- автоматическое управление поворотом лопастей;
- широкий диапазон углов установки лопастей;
- автоматическую установку ВВ во флюгер при отказе двигателя;
- иметь реверс винта при посадке;
- иметь минимальный установочный угол лопастей при запуске с целью уменьшения крутящего момента двигателя в первоначальный момент разгона;
- иметь промежуточный упор для обеспечения безопасности полета, при этом обеспечить снятие с промежуточного упора на посадке для создания отрицательной тяги для уменьшения длины пробега;
- иметь автоматические устройства, предохраняющие раскрутку воздушного винта и выход его на частоту вращения выше максимально допустимого;
- иметь большой КПД на важных режимах полета.
Контрольные вопросы.
1. Дайте объяснение характеристикам воздушного винта: профиль, хорда,
средняя линия.
2. Что такое геометрический шаг, поступь и скольжение воздушного винта?
3. Назовите аэродинамические силы элемента лопасти.
4. Есть ли разница между углом атаки и углом установки лопасти?
5. Что создаёт реактивный момент винта?
6. Как влияет скорость полёта на угол атаки В.В.?
7. Как изменяется тяга при увеличении скорости полёта?
8. Что такое эффективная и потребная мощности?
9. Что называется КПД В.В.?
10. Какие преимущества имеет ВИШ перед ВФШ?
11. Какие особенности имеют ВИШ на самолётах с ТВД?

