 2017-12-14
2017-12-14 819
819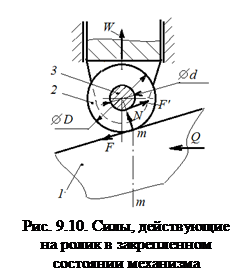 Повышение к.п.д. клиноплунжерного механизма достигается уменьшением коэффициентов трения в контакте плунжера с клином и основания клина с направляющими. Нужно не забывать при этом, что снижая коэффициенты трения на поверхностях клина, конструктор сознательно отказывается от использования клина в качестве самотормозящего механизма. Снижение коэффициентов трения достигается установкой роликов на плунжере и под основанием клина (см. рис. 9.7, д), либо только в одном из названных сопряжений. Новый коэффициент трения (приведенный) в контакте клина с роликом имеет промежуточное значения межу коэффициентом трения скольжения и коэффициентом трения качения для материалов данной пары сопрягающихся тел. Ролик 2, обкатываясь по поверхности клина 1 (трение качения). в то же время испытывает трение скольжения в контакте с осью 3 (рис. 9.10).
Повышение к.п.д. клиноплунжерного механизма достигается уменьшением коэффициентов трения в контакте плунжера с клином и основания клина с направляющими. Нужно не забывать при этом, что снижая коэффициенты трения на поверхностях клина, конструктор сознательно отказывается от использования клина в качестве самотормозящего механизма. Снижение коэффициентов трения достигается установкой роликов на плунжере и под основанием клина (см. рис. 9.7, д), либо только в одном из названных сопряжений. Новый коэффициент трения (приведенный) в контакте клина с роликом имеет промежуточное значения межу коэффициентом трения скольжения и коэффициентом трения качения для материалов данной пары сопрягающихся тел. Ролик 2, обкатываясь по поверхности клина 1 (трение качения). в то же время испытывает трение скольжения в контакте с осью 3 (рис. 9.10).
Новый (приведенный) коэффициент трения может быть найден из условия равновесия ролика в закреплённом состоянии клиноплунжерного механизма. Клин воздействует на ролик силой N. Равная ей, но направленная навстречу, на ролик действует реакция со стороны оси (не показана). Клин силой F стремится повернуть ролик по часовой стрелке. Сила трения скольжения F’ препятствует повороту. Уравнение статики для ролика сводится к равенству моментов сил трения:
Нахождение приведенного коэффициента трения в контакте ролика с плоскостью
Повышение к.п.д. клиноплунжерного механизма достигается уменьшением коэффициентов трения в контакте плунжера с клином и основания клина с направляющими. Нужно не забывать при этом, что, снижая коэффициенты трения на поверхностях клина, конструктор сознательно отказывается от использования клина в качестве самотормозящего механизма.
Снижение коэффициентов трения достигается установкой роликов на плунжере и под основанием клина (см. рис. 9.7, д), либо только в одном из названных сопряжений. Новый коэффициент трения (приведенный) в контакте клина с роликом имеет промежуточное значения межу коэффициентом трения скольжения и коэффициентом трения качения для материалов данной пары сопрягающихся тел. Ролик 2, обкатываясь по поверхности клина 1 (трение качения). в то же время испытывает трение скольжения в контакте с осью 3 (см. рис. 9.10).
Новый (приведенный) коэффициент трения может быть найден из условия равновесия ролика в закреплённом состоянии клиноплунжерного механизма. Клин воздействует на ролик силой N. Равная ей, но направленная навстречу, на ролик действует реакция со стороны оси (не показана). Клин силой F стремится повернуть ролик по часовой стрелке. Сила трения скольжения F’ препятствует повороту. Уравнение статики для ролика сводится к равенству моментов сил трения:
 (9.37)
(9.37)
Выразив силы трения через коэффициенты трения, получим:
 (9.38)
(9.38)
где D – наружный диаметр ролика; d – диаметр оси; tgφA – коэффициент трения качения в контакте ролика с клином; tgφB – коэффициент трения скольжения в контакте ролика с осью.
Из выражения (9.38) следует, что приведенный коэффициент трения в паре ролика с клином равен:
 (9.39)
(9.39)
Угол трения в этом контакте:
 (9.40)
(9.40)
Приведенный коэффициент трения tgφпр можно изменять, меняя соотношение диаметров d и D.
При проектировании механизма с роликами на наклонной поверхности и на основании клина, ось нижнего клина нужно располагать на вертикали m-m, для предотвращения перекоса клина. Для расчёта силы закрепления Wна таком клиноплунжерном механизме с роликами в формулах (9.27) и (9.28) вместо φ и tgφ1 нужно подставить угол φпр и tgφ пр.








