2017-12-14
2017-12-14 390
3904.1 Перед проведением лабораторной работы необходимо привести модули в исходное состояние:
Для проведения работы на персональном компьютере должно быть загружено ПО Labdrive и выбрана соответствующая работа.
4.2 Опыт короткого замыкания
Опыт короткого замыкания проводится при неподвижном (заторможенном) роторе
s = 1 и пониженном напряжении, при котором ток статора примерно равен номинальному току статора  .
.
Схема для проведения опыта короткого замыкания представлена на рисунке 1.

Рисунок 1 – Схема для проведения опыта короткого замыкания
Опыт проводится в следующей последовательности:
- включить автоматические выключатели QF1 и QF2 соответственное МПС и МП;
- переключателем SA1 МДС1 вводить сопротивление в цепь статора до тех пор, пока ток статора примерно будет равен номинальному. Данные занести в таблицу 1.
Таблица 1 – данные опыта
| Данные опыта | Расчетные данные | ||||||||||
| U1ФК | I1ФК | P1ФК | 
| P1К | Δ PЭЛ.1 | Δ PCТ | PЭМ.К | МЭМ.К | zK | rK | xK |
| В | A | Вт | Вт | Вт | Вт | Вт | Н∙м | Ом | Ом | Ом | |
Расчетные данные.
Трехфазная активная мощность при опыте короткого замыкания, Вт:  .
.
Электрические потери в цепи статора, Вт:  .
.
Потери в стали при напряжении U1K, Вт:  ,
,
где  – потери в стали при номинальном напряжении, Вт.
– потери в стали при номинальном напряжении, Вт.
Электромагнитная мощность при опыте короткого замыкания,:  .
.
Электромагнитный момент при опыте короткого замыкания, Н∙м:
 ,
,
где n1 – синхронная частота вращения, об/мин;
 – синхронная угловая частота вращения, рад/сек:
– синхронная угловая частота вращения, рад/сек:  ,
,
где p – число пар полюсов (Приложение Б).
Электромагнитный момент при номинальном напряжении, Н∙м:  .
.
Кратность пускового момента:  ,
,
где  и
и  – номинальная мощность на валу и угловая номинальная частота вращения (Приложение Б).
– номинальная мощность на валу и угловая номинальная частота вращения (Приложение Б).
Кратность пускового тока:  .
.
4.3 Опыт холостого хода
Схема для проведения опыта холостого хода представлена на рисунке 2.

Рисунок 2 – Схема для проведения опыта холостого хода
Опыт проводится в следующей последовательности:
- включить автоматические выключатели QF1 и QF2 соответственное МПС и МП;
- переключатель SA1 МДС1 установить из положения «∞» в положение «0», напряжение принимает значение, равное номинальному, запускается асинхронный двигатель. Данные занести в таблицу 2.
Таблица 2 – данные опыта
| Данные опыта | Расчетные данные | ||||||||||
| U1ФН | I 10 | P1Ф | n | 
| P 10 | 
| Δ PЭЛ.1 | P 0 m | Δ PCТ | Δ PCТ.1 | 
|
| В | A | Вт | об/мин | рад/с | Вт | Вт | Вт | Вт | Вт | ||
Расчетные данные.
Коэффициент мощности 
 ,
,
где P 10 – активная мощность трех фаз, Вт:  .
.
Электрические потери в цепи статора, Вт:  .
.
Потери в стали сердечника статора при номинальном напряжении, Вт:
 ,
,
где r1 – активное сопротивление фазы статора при температуре окружающей среды, Ом (Приложение Б);
 – механические потери асинхронного двигателя (Приложение Б);
– механические потери асинхронного двигателя (Приложение Б);
 – механические потери машины постоянного тока (Приложение Б).
– механические потери машины постоянного тока (Приложение Б).
Потери в стали сердечника статора при любом другом напряжении могут быть пересчитаны через квадрат напряжения:  ,
,
где  – потери в стали при любом значении напряжения U 1, Вт.
– потери в стали при любом значении напряжения U 1, Вт.
Значение тока холостого хода в относительных единицах:  .
.
4.4 Расчет параметров асинхронного двигателя. Построение схемы замещения
Из опыта холостого хода:
- активное сопротивление намагничивающей цепи  ;
;
- полное сопротивление намагничивающей цепи  ;
;
- индуктивное сопротивление намагничивающей цепи  .
.
Из опыта короткого замыкания:
- полное сопротивление  ;
;
- активное сопротивление  ;
;  ;
;
- индуктивное сопротивление  ;
;  .
.
Т -образная схема замещения асинхронного двигателя представлена на рисунке 3.

Рисунок 3 – Т -образная схема замещения.
4.5 Снятие рабочих характеристик
Схема для снятия рабочих характеристик, представлена на рисунке 4.
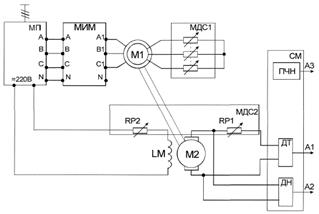
Рисунок 4 – Схема для снятия рабочих характеристик.
Опыт проводится в следующей последовательности:
- переключателем SA1 модуля МДС1 ввести сопротивление (задается преподавателем);
- включить автоматы QF1 и QF2 модулей МПС и МП, запустится асинхронный двигатель. Нагрузкой ГПТ служат сопротивления RP1 модуля МДС2;
- переключателем SA1 МДС2, уменьшая сопротивление, увеличивать нагрузку ГПТ, пока ток якоря ГПТ не достигнет номинального значения IНАГР = IЯ ≈ IЯН (IЯН = 1,3А, изменить сопротивление в цепи ротора и повторить опыт.
Опытные данные со стороны, как асинхронного двигателя, так и генератора, занести в таблицы 3 и 4.
Таблица 3 – данные опыта
| Со стороны асинхронного двигателя | ||||||||||||||||||
| Данные опыта | Расчетные данные | |||||||||||||||||
| U1Ф | I1Ф | P1 | n | I2 |
| U1 | Δ PЭЛ.1 | Δ PCТ | PЭМ | s | Δ PЭЛ.2 | Δ PМЕХ | Δ PЭЛ.ДОБ | 
| Р2 | 
| 
| МЭМ |
| В | A | Вт | об/мин | A | 1/c | В | Вт | Вт | Вт | Вт | Вт | Вт | Вт | Вт | % | Н∙м | ||
Таблица 4 – данные опыта
| Со стороны ГПТ | ||||||||
| Данные опыта | Расчетные данные | |||||||
| IЯ | UЯ | СМ | МЭМ | IЯ0 | М 0 | М 2 | Р2 |
|
| A | В | Н∙м | А | Н∙м | Н∙м | Вт | % | |
Расчетные данные со стороны асинхронного двигателя:
Частота вращения электродвигателя, рад/с:  .
.
Электрические потери в обмотке статора асинхронного двигателя:  ,
,
где r1 – активное сопротивление фазы статора, приводится в паспортных данных двигателя, Ом (Приложение Б).
Потери в стали сердечника статора при номинальном напряжении, Вт:
,
где  – механические потери асинхронного двигателя, Вт (Приложение Б);
– механические потери асинхронного двигателя, Вт (Приложение Б);
 – механические потери машины постоянного тока, Вт (Приложение Б).
– механические потери машины постоянного тока, Вт (Приложение Б).
Потери в стали при напряжении U1Ф, Вт:  ,
,
Электромагнитная мощность, Вт:  .
.
Скольжение:  .
.
Электрические потери в обмотке ротора, Вт:  .
.
Электрические потери в добавочных сопротивлениях ротора, Вт:  .
.
Суммарные потери в двигателе, Вт:  .
.
Полезная мощность на валу двигателя, Вт:  .
.
Полезный момент на валу двигателя, Н∙м:  .
.
Электромагнитный момент двигателя, Н∙м:  .
.
где  – синхронная угловая частота вращения электродвигателя, 1/с.
– синхронная угловая частота вращения электродвигателя, 1/с.
Коэффициент полезного действия, %:  .
.
Коэффициент мощности (расчетный):  .
.
Электромагнитный момент ГПТ, Н∙м:  ,
,
где CM – принимается из тарировочной кривой,  (Приложение В).
(Приложение В).
Момент холостого хода ГПТ, Н∙м:  ,
,
где  – ток холостого хода, принимается из тарировочной кривой машины постоянного тока (Приложение В) и пропорционален механическим потерям и потерям стали ГПТ, А.
– ток холостого хода, принимается из тарировочной кривой машины постоянного тока (Приложение В) и пропорционален механическим потерям и потерям стали ГПТ, А.
Полный момент на валу ГПТ, Н∙м:  .
.
Полезная мощность на валу ГПТ, Вт:  .
.
Рабочие характеристики представляют собой графически изображенные зависимости тока статора, потребляемой из сети активной мощности, частоты вращения, скольжения, электромагнитного момента, КПД и коэффициента мощности от полезной мощности на валу двигателя:
 .
.
По данным опыта построить механическую  и электромеханическую
и электромеханическую  характеристики.
характеристики.
Контрольные вопросы
5.1 Как изменить направление вращения асинхронного двигателя? Как изменится момент асинхронного двигателя при понижении напряжения питающей сети?
5.2 Может ли асинхронный двигатель создавать момент при синхронной частоте вращения, т.е. может ли он вращаться с синхронной частотой вращения?
5.3 Как изменяется ток статора двигателя при повышении напряжения и неизменной нагрузке на валу двигателя? Объяснить физический смысл зависимости  .
.
5.4 Как влияет величина добавочного сопротивления в цепи ротора на величину момента? Как влияет величина добавочного сопротивления в цепи ротора на жесткость механической характеристики?
Вывод: