 2018-01-08
2018-01-08 424
424
Для вимірювання температури поряд з дилатометричними, пневматичними, біметалевими, полупровідниковими первинними перетворювачами температури (ГНІТ) широко використовуються металеві термометри опору, які використовуються при підвищених вимогах, до точності вимірів.
Металеві термометри опору (мідні та платинові) використовуються при температурі -120°... + 700° С.
У діапазоні температур -70...+200°С зміну опору можна представити у вигляді
лінійної залежності
Rt = R0(1+aq) (3.1)
де

- температурний коефіцієнт опору термометра (для мідних термометрів a=0,0043 Ом/град у діапазоні вимірювань -50... + 100°С; для платинових a=0,00396 Ом/град у діапазоні вимірювання -70...+200°С).
Приладобудівна промисловість випускає кілька модифікацій термометрів опору:
Мідних: R0 = 53 Ом (градуіровка 23).
R0 = 100 Ом (градуіровка 24).
Платинових: R0 = 46 Ом (градуіровка 21).
R0 = 100 Ом (градуіровка 22).
Для вимірювання температури з допомогою термометра опору найширше використовується мостова рівновісна схема, зображена на рис.3.1.
Умова рівноваги моста (струм крізь гальванометр ГІ рівний нулю) буде при виконанні умови
Очевидно, що

Очевидно, що
 (3.2)
(3.2)
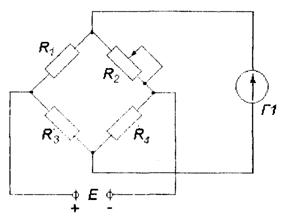
Рис.3.1
Отже, домагаючись зміною значення R2 рівноваги схеми, можна по значенню R2 в момент рівноваги робити висновки про величину Rt тобто про зміну температури.
В промислових електронних автоматичних мостах урівновага моста робиться автоматично з допомогою двигуна М, який переміщує повзун реохорда R2 і змінює співвідношення плечей моста Rt та R2, як показано на рис.3.2:

Рис. 3.2
Включення термометра опору в вимірювальну схему здійснюється через опір реальної лінії зв'язку Rлз. Для зменшення впливу лінії зв'язку на результат вимірювання термометр опору вмикається по трипровідній лінії зв'язку. В цьому випадку Rлз. входить у сусідні плечі моста (послідовно Rt та R3), що не порушує рівноваги моста.
При появі розбалансу моста за рахунок зміни Rt напруга розбалансу надходить на підсилювач і спричиняє рух двигуна М, який механічно зв'язаний з повзуном реохорда RP. Переміщення повзуна буде відбуватись доти, доки міст знову не прийде у стан рівноваги. У такій системі міст завжди урівноважений і по положенню повзуна реохорда можна судити про величину Rt, тобто про значення вимірюваної температури.








