 2014-01-25
2014-01-25 1523
1523Пусть в результате приведения системы сил к заданному центру  получилось:
получилось:
1.  ,
,  — система находится в равновесии; можно сказать, что она приводится к прямо противоположным силам.
— система находится в равновесии; можно сказать, что она приводится к прямо противоположным силам.
2. ,  — сила отсутствует, система приводится к паре сил. Выбор полюса приведения не влияет на момент пары сил.
— сила отсутствует, система приводится к паре сил. Выбор полюса приведения не влияет на момент пары сил.
3.  , — система приводится к одной силе – равнодействующей.
, — система приводится к одной силе – равнодействующей.
4.  , ,
, ,
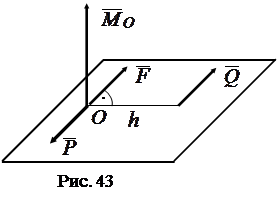
Через точку проведем плоскость, перпендикулярную вектору момента  (рис. 43). Приведем систему сил к силе
(рис. 43). Приведем систему сил к силе  и паре сил
и паре сил  , – центр приведения. Сила лежит в проведенной плоскости, приложена в центре приведения и равна главному вектору:
, – центр приведения. Сила лежит в проведенной плоскости, приложена в центре приведения и равна главному вектору: . Пара сил
. Пара сил
с моментом также лежит в проведенной плоскости. Одну из сил пары выберем равной и прямо противоположной силе :  . Другую силу пары
. Другую силу пары  (
( ) проводим так, чтобы момент пары был равен главному моменту системы сил, то есть
) проводим так, чтобы момент пары был равен главному моменту системы сил, то есть  .
.
Полученная система сил  эквивалентна одной силе , так как применяя элементарную операцию, прямо противоположные силы и
эквивалентна одной силе , так как применяя элементарную операцию, прямо противоположные силы и  можно отбросить. Система сил приводится к равнодействующей.
можно отбросить. Система сил приводится к равнодействующей.
Общий признак существования равнодействующей
Объединяя частные случаи 2 и 4 можно установить общий признак существования равнодействующей.
Система сил приводится к равнодействующей, если главный вектор не равен нулю, а скалярное произведение главного вектора на главный момент равно нулю:
,  .
.
Действительно,  (при ), если или
(при ), если или 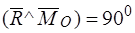 , то есть .
, то есть .
5. , , // .
.
 Плоскость пары перпендикулярна векторам силы и момента . Таким образом, система эквивалентна силе и паре , плоскость которой перпендикулярна силе (рис. 44)
Плоскость пары перпендикулярна векторам силы и момента . Таким образом, система эквивалентна силе и паре , плоскость которой перпендикулярна силе (рис. 44)
Определение. Совокупность силы и пары сил, которая лежит в плоскости, перпендикулярной этой силе называют динамическим винтом или динамой.
6.
 |
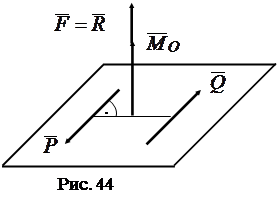
, ,  (рис. 45а).
(рис. 45а). Разложим вектор момента на две составляющие:  //,
//,  (рис 45б). Через точку проведем плоскость, перпендикулярную вектору
(рис 45б). Через точку проведем плоскость, перпендикулярную вектору  и построим пару
и построим пару  такую, что
такую, что  , , а момент пары
, , а момент пары  (рис. 45в). Таким образом, сила и пара сил с моментом эквивалентны силе , приложенной в точек
(рис. 45в). Таким образом, сила и пара сил с моментом эквивалентны силе , приложенной в точек  , на расстоянии:
, на расстоянии:
 .
.
Следовательно, исходная система сил эквивалентна силе и паре сил с моментом , причем векторы и параллельны. Система приводится к динаме.
Общий признак приведения системы сил к динаме
Объединяя случаи 5 и 6, получим:
Система сил эквивалентна динаме, если скалярное произведение её главного вектора на главный момент не равно нулю:
 .
.
Теорема Пуансо и частные случаи из нее позволяют привести заданную систему сил к простейшему виду.
Простейшие виды системы сил Условия приведения
1. Прямопротивоположные силы  .
.
2. Пара сил  .
.
3. Одна сила (равнодействующая)  .
.
4. Динама  .
.

